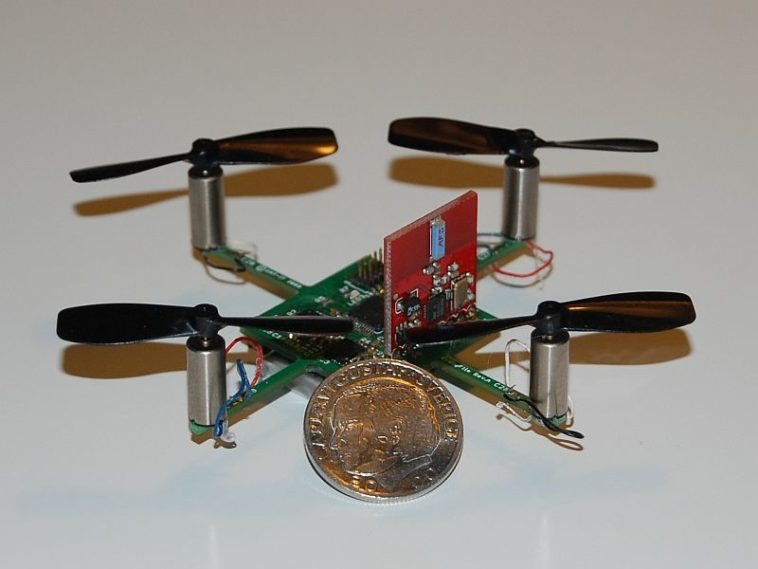
Luego de su presentación en Mayo de 2010, bajo el nombre de CrazyFlie, este diminuto artefacto volador que cabe en la palma de la mano, ha evolucionado hasta alcanzar una estabilidad de vuelo importante en función de su tamaño. Con sus componentes soldados en una sartén hasta los controles de vuelo operados desde un mando de Playstation, CrazyCopter no dejará de sorprenderte en ningún momento. Todos los aficionados a este tipo de vehículos de vuelo no pueden dejar de leer este artículo donde encontrarán información, imágenes, videos y un final con muchos aparatos estrellados. Es decir, un video que demuestra que las maniobras no siempre terminan como el piloto pretende. ¡Imperdible!
Dueño de un sonido muy particular al realizar sus vuelos, cual si fuera el zumbido de un mosquito, CrazyCopter exhibe toda su miniaturización y despliegue tecnológico con mucha gracia y belleza. Con una mecánica muy elemental, basada en un trozo de PCB y cuatro pequeños motores pegados a la placa, la electrónica interior muestra la otra cara de la moneda en este proyecto. El sistema es controlado por un microcontrolador STM32 Cortex-M3, posee un acelerómetro de 3 ejes, dos giróscopos (eje Z y ejes X e Y), un sistema de radio de 2,4Ghz y por supuesto, una batería LiPo de tan sólo 110mA, que al igual que los motores y las hélices, corresponden al aeromodelo Silverlit X-Twin. Es decir, en la potencia de la electrónica empleada, sus creadores han depositado toda la confianza para resolver las eventuales deficiencias de montaje que siempre existen. El diagrama en bloques del equipo es muy sencillo de interpretar donde se destacan el Cortex – M3 de ARM, los sistemas IMU y el enlace de radio a 2,4Ghz.
El Quad se organiza alrededor del microcontrolador y la función elemental de éste es la adquisición de las mediciones ofrecidas por los giróscopos y acelerómetros para luego controlar los motores y mantener la estabilidad del vehículo. Esto es posible mediante un bucle de regulación que controla la velocidad de los motores bajo una tasa de refresco de información de 250 veces por segundo. La comunicación por radio tiene un ancho de banda muy bajo y se utiliza para enviar comandos al Quad y recibir datos de telemetría desde el mismo.
El grupo de diseño que hace posible CrazyCopter está formado por tres personas que reparten sus tareas desarrollando el software necesario de control. Dos lo hacen en Linux y el tercero trabaja sobre SO Windows. Además, el uso de software libre les permite realizar el software necesario de manera sencilla y muy efectiva. Los programas principales son el compilador GCC de CodeSourcery (para la compilación del programa del Quad), GNU Make (para la construcción del proyecto), Mercurial (para el control de código fuente), y Python / Pyusb (para la comunicación vía radio). Todos estos programas funcionan a la perfección tanto en Linux como Windows y gracias a esta particularidad el proyecto es bastante fácil de manejar, construir y ampliar. Otro detalle a destacar es el peso total del PCB con sus componentes: apenas 20 gramos y la distancia entre motores es de tan sólo 8 centímetros. Toda una miniatura.
En la parte superior de la placa se destacan muchas partes fundamentales. Encontramos el JTAG/Serial que es el conector a través del cual se realiza la programación/depuración del código del microcontrolador (el conocido ICSP en nuestros montajes con PIC) , que, como mencionamos antes, es un STM32 Cortex-M3 que corre a 64MHz con su oscilador interno. El giróscopo para los ejes X – Y es un IDG500 Invensense que cuenta con salidas analógicas y, por este motivo, se conecta a los convertidores “analógico – digital” del microcontrolador. Por su parte el giróscopo restante (eje Z) es un ISZ500, también Invensense y con el mismo tipo de salida analógica. El sistema de radio se basa en un nRF24L01 + un chip de Nordic Semiconductor y se conecta vía SPI al microcontrolador. El acelerómetro de 3 ejes es un SMB380 de Bosh y trabaja vía I2C. A pesar de poseer un aspecto de alto profesionalismo constructivo, las soldaduras de los elementos en la parte superior fue realizada según procedimientos que podríamos denominar “artesanales” y no dejan de asombrar a cualquiera. Una sartén es el típico ejemplo del ingenio popular aplicado a solucionar las mismas necesidades que resuelven grandes y costosos hornos. Soldadura en pasta, mucho flux, buen control de la temperatura y nada puede detener a un grupo de personas inteligentes con una sartén en la mano.
En la parte inferior del PCB, pero con componentes soldados mediante el uso del tradicional soldador o cautín, encontramos las etapas de alimentación y distribución energética del sistema. Un interruptor de encendido de la unidad, reguladores de 3,3Volts para las IMU’s, los transistores que se encargan de activar los motores, un convertidor Step-Up que entrega 5Volts y los circuitos correspondientes a los sistemas de carga de la batería. La autonomía de vuelo es algo pobre si pensamos en disfrutar de algunas horas de entretenimiento. Con tan sólo capacidad de 4,5 minutos, los desarrolladores han logrado encontrar el equilibrio entre el tiempo de un vuelo de demostración y un peso apropiado de la batería que le permita al Quad desplegar sus habilidades en el aire.
Tal como has podido apreciar en el video, hay dos cosas que se destacan y son de una relevancia importante. La primera es el mando con el que se opera el Quad que está conectado a un ordenador encargado de procesar la información que el control de mando (un mando con enlace Bluetooth de Playstation) le envía al equipo de radio para su enlace. Solución muy simple a un problema complejo y costoso de controladores para radiocontrol. La segunda particularidad (muy) notoria es la cantidad de golpes a los que el Quad era sometido. Particularmente pienso que pueden existir dos razones por las que los golpes y caídas hayan sido una constante en el transcurso de las imágenes. O intentaban demostrar que a pesar de tener una apariencia muy frágil, CrazyCopter es muy fuerte; o no podían ocultar lo difícil que puede ser manejar un elemento tan pequeño con naturalidad en espacios tan pequeños como una sala. Crazy Copter todavía tiene un largo camino por recorrer y está previsto que salga a la venta en forma de KIT, por lo que les invitamos a estar atentos a un inminente lanzamiento comercial. Pero no creas que Crazy Copter es el único que se pega duro contra el piso o las paredes, observa este video “de lo que no se muestra” en las tradicionales presentaciones de los Quads “que lo hacen todo bien”. ¡Disfrútalo! ¡Todos aprendemos a caminar de la misma manera!

Seguro que los comerciales no serán tan resistentes.
Esos tienen una finalidad bélica
jajaja… finalidad belica. Puede que al final suceda como todo avance en la ciencia, que se use para la guerra, pero no creo que los diseñadores lo vayan a permitir tan facilmente…
Claroooooo… se usara para la guerra eso es inminente.. pero despues de eso, esa va a ser la tecnologia de los carros voladores del mañana que tanto soñamos… algo bueno va a surgir de estos diseños..
Nada del otro mundo……
si se usan para la guerra y siguen asi de locos acabaran con todo pero al enemigo nada de nada, eso es para tirar chapa
Genial, la parte de soldadura por sartén 😀 y usar la misma placa como bastidor son excelente ideas, es genial todo muchas gracias 😀