El futuro de la exploración de Marte puede estar en manos del Axel Rover, un extraño vehículo modular de dos ruedas que no se parece en nada a los anteriores robots de la NASA. Fruto del trabajo conjunto entre la agencia espacial norteamericana y estudiantes del Instituto Tecnológico de California, el Axel Rover promete revolucionar la forma en que un vehículo con ruedas se desplaza por la superficie de un planeta.
Los ingenieros del Laboratorio de Propulsión a Chorro de la NASA, junto a un grupo de estudiantes profesores del Instituto Tecnológico de California han diseñado (y probado) un prototipo de vehículo liviano y versátil al que han llamado Axel. Este “rover” puede (literalmente) descolgarse por acantilados, moverse con libertad sobre terrenos rocosos irregulares y explorar incluso el interior de cráteres profundos. Esto es posible gracias a su extraño diseño basado en un par de ruedas ajustables. Las futuras naves espaciales robóticas que la NASA envíe a Marte podrían transportar varios ejemplares del Axel Rover para recorrer y explorar su superficie.
Según sus creadores, el sistema Axel Rover es una familia de plataformas destinadas a facilitar la movilidad de los vehículos robóticos que se destinan a la exploración de superficies planetarias extraterrestres en el sistema solar. El componente básico de este sistema puede acoplarse a otros similares para obtener configuraciones más grandes, que pueden resultar apropiadas en determinadas circunstancias.

- Axel Rover: El reemplazo marciano de Phoenix

- Axel Rover: El reemplazo marciano de Phoenix
Uno de los puntos más atractivos de su diseño es la escasa complejidad que posee. “Axel” se basa en un diseño simétrico, que sólo necesita de tres actuadores para controlar dos sus ruedas y una especie de brazo que también puede comportarse como un estabilizador. En realidad, este apéndice tiene, según la NASA, varias finalidades: proporciona una fuerza de reacción contra el empuje de las ruedas, permite ajustar el ángulo del rover para apuntar sus cámaras estéreo, y proporciona un cierto nivel de redundancia por si uno de los actuadores de las ruedas se descompone. A pesar de utilizar solo tres actuadores, este rover es capaz de seguir caminos arbitrarios, que se deciden sobre la marcha, escalando y descendiendo por pendientes muy inclinadas.
El extraño vehículo puede ser ensamblado con diferentes tipos y tamaños de ruedas, que incluyen desde modelos plegables hasta otros neumáticos inflables. De esta manera, el rover obtiene la versatilidad necesaria como para atravesar terrenos empinados y rocosos, además de soportar los fuertes impactos producidos durante el aterrizaje o la marcha a “Marte traviesa”. Por otra parte, Axel tiene todos sus sensores, actuadores, electrónica, fuente de energía, y carga útil en el interior del cilindro central. Esta configuración proporciona un cuerpo compacto que facilita su lanzamiento, a la vez que le otorgar una gran robustez frente a los ambientes extremos que puede encontrar en sus misiones planetarias. El prototipo de Axel disponible está equipado con módulos de comunicación y de cómputo, cámaras estéreo, y un sensor inercial de navegación autónomo capaz de evitar obstáculos.
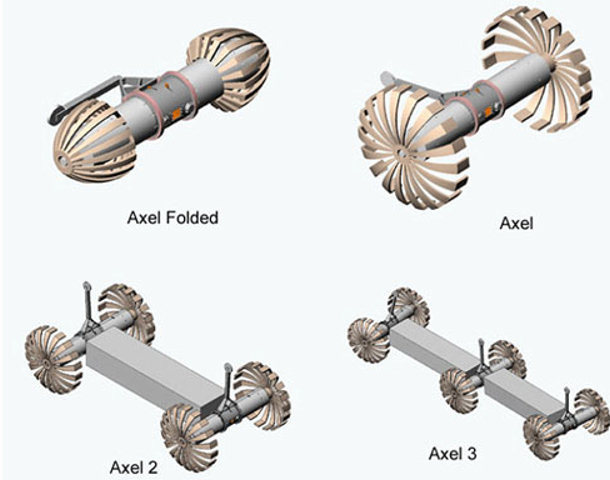
Otra gran ventaja del diseño innovador de Axel es su posible uso como parte de un sistema más amplio. En efecto, el pequeño rover “organizarse” en toda una familia de configuraciones diferentes, permitiéndole transportar una mayor carga útil. El Laboratorio de Propulsión a Chorro dirigió el equipo que desarrolló Axel en colaboración con el profesor CIPRA Raymond (Universidad de Purdue), el profesor Murray Clark (Arkansas Tech University) y el profesor Joel Burdick (Caltech).


Otra prueba de que aveces lo mejor no es lo más sofisticado, sinó
lo mejor pensado. Aunque el diseño es "copiado" al carro a control remoto
"Tyco radiocontrol". Siguen los esfuerzos por explorar el universo buscando lo que
se sabe que está allí, consecuencia de la incapacidad del hombre de solucionar sus problemas más inmediatos.
A este tipo de avances me refería con mi comentario en el artículo del otro día (sobre ISS), creo que hay que estudiar muy bien el diseño de futuras naves espaciales y robots de exploración para poder hacer las cosas como es debido. Muchas de las cosas básicas que hay que mejorar se pueden estudiar en la tierra, (nuestras naves tripuladas nisiquiera son capaces de viajar hasta marte en un tiempo razonable y de una manera fiable hoy día). Yo no entiendo de ingeniería aeroespacial, me dedico a las telecomunicaciones pero estoy seguro de que algún día veremos naves que se propulsen de alguna forma que las haga mucho mas veloces y podrán cumplir sus objetivos en menos tiempo.. y seguramente estos avances sean fruto de estudios realizados en tierra firme.
"www-"!?
que tipo de dirección es esa.
Lo raro es que parece un error del video, pero lo pruebas y ¡Funciona!
Mmm… mepa que la crisis llegó a la nasa…