La rueda, una de las tecnologías más antiguas de la humanidad, ha permitido desplazarse durante siglos a nuestros vehículos. Sin embargo, los seres vivos utilizan sus piernas, un medio más adecuado para movilizarse cuando el terreno no es llano. A la hora de diseñar un robot, los ingenieros deben decidir si lo van a dotar de piernas o de ruedas. Un grupo de trabajo del Laboratorio de Robótica Bio-Inspirada de la Universidad Nacional de Taiwan (BioRoLa) ha dado por resuelta la cuestión creado Quattroped, un robot que puede transformar sus ruedas en piernas cuando las condiciones del terreno lo requieren.
A la hora de desplazarse, las opciones mas utilizadas son las patas (animal), las piernas (si se trata de un ser humano) o las ruedas (si hablamos de algún tipo de vehículo terrestre). Sin embargo, hay un grupo de dispositivos en los que la elección entre una y otra alternativa no es tan sencilla: los robots. Las ruedas tienen la innegable ventaja de la simplicidad. Cualquier estudiante o aficionado puede ajustar una rueda al eje de un motor, y resolver el problema del desplazamiento de su robot. Las piernas (o patas) poseen un mejor desempeño en superficies escarpadas, a la hora de subir una escalera o superar algún obstáculo imprevisto. Pero implementar una pata articulada, aun utilizando servomecanismos disponibles en forma comercial, es una tarea bastante más compleja.
A la hora de diseñar un robot, los ingenieros se enfrentan a la decisión de dotarlo de piernas o de ruedas. En la configuración elegida tiene mucho peso el tipo de terreno por el que se desplazará el robot, ya que las ruedas permiten ir muy rápido por terreno llano, mientras que las piernas -más lentas- le posibilitan el acceso a muchos sitios vedados para las ruedas. Los miembros del equipo del Laboratorio de Robótica Bio-Inspirada de la Universidad Nacional de Taiwan (BioRoLa, por Bio-Inspired Robotic Laboratory) han resuelto el problema de la forma más inteligente: en su robot Quattroped utilizaron ruedas que se pueden convertir en piernas.
Lo mejor de todo es que el sistema funciona. Y muy bien. Las piernas no se parecen demasiado ni a las tuyas ni a las de cualquier otro animal, pero cumplen perfectamente con su cometido. A diferencia de otros “híbridos”, que cuentan con mecanismos y actuadores independientes para las ruedas y las piernas, el Quattroped utiliza un “mecanismo de transformación” que convierte cada rueda en una pierna, o viceversa.
Desde el punto de vista geométrico, una rueda convencional se compone de un borde circular y un eje de rotación situado en el centro de la llanta. La rueda gira de forma continua y el contacto entre el robot y el suelo se produce directamente debajo de la articulación de la cadera, a una distancia fija. Pero en la locomoción basada en patas, cada pierna se mueve de forma periódica y no hay ninguna configuración geométrica específica entre la articulación de la cadera y el punto de contacto con el suelo, lo que provoca que la posición relativa de las piernas varíe periódicamente durante la locomoción.
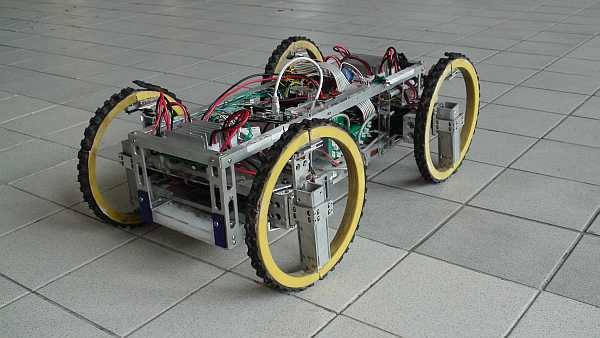
En Quattroped existe un mecanismo que controla directamente la posición relativa del borde circular de la rueda con respecto a la articulación de la cadera, capaz de generar tanto el movimiento de la rueda como de la “pata”. La pata, en realidad, no es otra cosa que la misma rueda que se pliega sobre si misma -en el vídeo se ve perfectamente como se realiza esta transformación- mientras permanece unida a lo que sería el eje. El resultado es excelente, ya que proporciona al robot una pierna fuerte y mecánicamente simple.
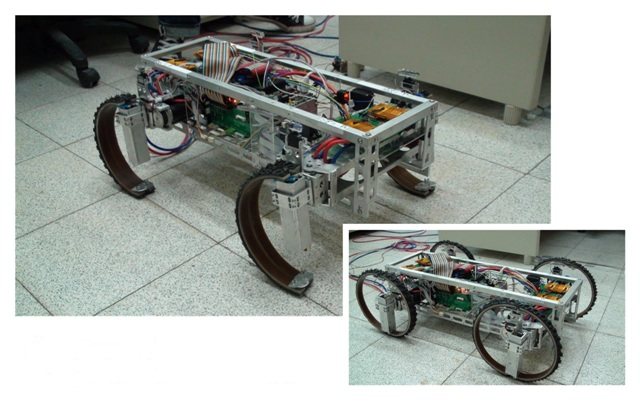
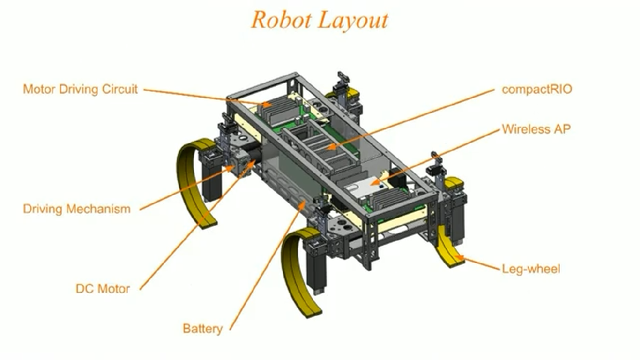
En cuanto al control del robot, un ordenador embebido corriendo a 400 MHz de encarga de leer el estado de los numerosos sensores con los que está equipado, posicionar piernas o ruedas según corresponda, y comunicarse inalámbricamente con el ordenador -un PC común y corriente- que lo controla. Un GPS, un “radar laser”, un acelerómetro y una serie de sensores infrarrojos instalados en el Quattroped le proporcionan un cierto grado de autonomía. Pero todo esto se puede encontrar en muchos robots experimentales. Lo que diferencia al Quattroped del resto de la manada es su habilidad para modificar su estructura y convertirse en un cuadrúpedo. Realmente, se trata de una sencilla pero efectiva idea que seguramente veremos pronto en otros robots.
Las imágenes que ilustran la nota pertenecen al video publicado por National Instruments Corporation.


Hola a todos!
La autoría de este artículo corresponde a Ariel Palazzesi que, por problemas técnicos, no ha podido estar presente hoy y me encomendó acercarles la nota que acaban de leer. Es su deseo y el mío que la hayan disfrutado.
Gracias.
Mario
OMG, casi estaria resuelto el tema de exploraciones de tuberias, cavernas u otros accesos con posibles cambios de nivel o incluso escaleras WOW, eso si, para hacerlo de mayor tamaño… todos sabemos lo que ocurre conforme vas añadiendo peso a estas cosas…
Impresionante!, saludos Mario y Ariel. Espero que Ariel no este enfermo.
Hola falke!
Gracias por los saludos!
Sólo problemas técnicos. Nada para preocuparse 😉
Gracias por tu atención.
Saludos!
Mario
Los decepticons ya habían resuelto el problema de manera mucho más eficiente, luego los autobots, celosos, iniciaron una guerra que ha destruido su planeta y llegado hasta la tierra.
Saludos a los Editocons con y sin problemas técnicos.
Esta re copado! re locoooo copadooo
hace un par de semanas habia visto otro llamado RHEX, con un sistema de locomocion similar a este, solamente que este hace la transformacion de rudas a piernas, RHEX solo tiene piernas
aqui esta el video de RHEX http://proyectozito.blogspot.com/2011/03/x-rhex.html
Excelente ese robot, muy funcional y muy creativa la idea.
Que pasaria si las ruedas se transformaran hacia el otro lado, no tendria mejor agarre?. Solo es curiosidad; aunque seguramente los ingenieros que los diseñaron le dieron esa forma por sus buenas razones y mejores opciones.
Si señorrr Gracias NeoTeo por este pedazo de proyecto, esto es lo que la NASA desesitaaaa!!!
lo malo de este sistema creo que a alta velocidad debe temblar mucho si no esta contrapesada la rueda, es decir debe tener la función de un motor de control de vídeo juego debido al desbalance de la pieza que sujeta la rueda … de todos modos me imagino que ya pensaron en eso
Vacanisimo, porque no se les había ocurrido antes, bueno a mi se me hubiese ocurrido recostar las llantas y caminar sobre ella pero no creo que mi idea haya sido mejor que esta nunca
Me encanto, Ojala y sigan con este proyecto y no lo dejen parado como muchos