
Uno de los mejores ejemplos respecto al dominio de la técnica por parte del hombre se encuentra en la capacidad de transmitir órdenes de acción a un dispositivo remoto, sin contacto físico alguno. Poder realizar una operación a distancia sin cables de unión supone una ventaja muy grande si pensamos en ubicaciones físicas alejadas, objetos con movilidad impredecible y/o zonas a las que un ser humano no puede acceder. Aprende con nosotros a explorar las infinitas posibilidades que te brinda el radiocontrol.
Los medios físicos de enlace entre los comandos de control y los sistemas electromecánicos diseñados para realizar trabajos específicos son cosa del pasado. En la práctica, todo lo que signifique un ahorro de costos y una mayor rapidez de montaje triunfa por sobre cualquier metodología tradicional. Los sistemas inalámbricos o wireless son una muestra cabal de ello. Más aún cuando se habla de grandes instalaciones industriales que utilizan kilómetros interminables de cableado, el cual puede reemplazarse por sencillos mandos despojados de estructuras físicas. La comodidad de trasladar y/o rediseñar una sala de control industrial sin intervención de personal especializado y sin necesidad de replantear un tendido de cables por cada simple movimiento de una máquina consolida el atractivo y el vuelco de los diseñadores y usuarios hacia los modernos sistemas inalámbricos.
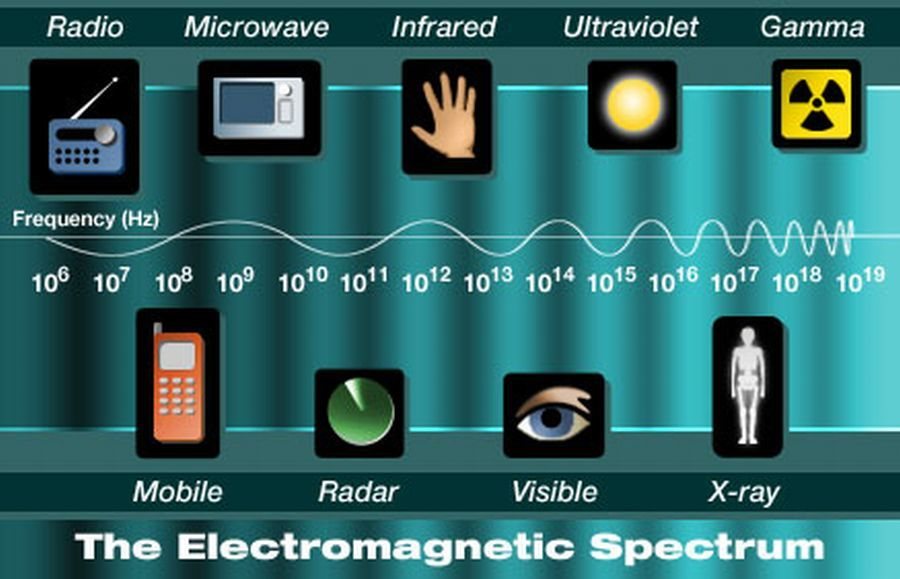
La televisión, Internet, el audio, los sistemas de vigilancia, la telefonía, e infinidades de aplicaciones electrónicas que conviven diariamente con nosotros, se conectan y operan a través de un enlace que no es físico. Un ejemplo de ello es la tecnología de los haces infrarrojos que encontramos en auriculares inalámbricos, mandos a distancia de televisión, DVD o cadenas de sonido, algunos modelos de teléfonos móviles y/o unidades de almacenamiento, y hasta los enlaces con un protocolo definido, como es el IrDA. Este tipo de tecnología debe obligatoriamente poseer un enlace óptico y visual que nunca debe perderse ni alterarse. Al igual que la tecnología láser, que es utilizada para leer información desde un disco de almacenamiento de datos, nunca puede desplazarse en absoluto de su alineación exacta, ya que esto significaría en todos los casos la pérdida de transferencia de señal y, por consecuencia, la interrupción del correcto funcionamiento.

Un pequeño error mecánico, polvillo o grasitud acumulada en los emisores / detectores del haz luminoso, humo, fatiga de materiales, y el consecuente cambio físico estructural de los soportes mecánicos, son algunos de los problemas que provocan fallos en los enlaces ópticos, problemas que en ocasiones son muy complejos de detectar y de resolver de forma efectiva.
A pesar de que la comunicación óptica permite una tasa de transferencia de datos muy interesante (hasta 4 Mbps en IrDA), los factores de riesgo de una posible pérdida de enlace hacen que estas aplicaciones sean muy puntuales y específicas, orientadas siempre al entorno industrial, donde el ser humano no tiene intervención o donde dicha intervención es escasa.
La radiofrecuencia y su aplicación universal
Atravesando paredes, obstáculos, grandes distancias y ámbitos hostiles que otros sistemas de enlace no podrían alcanzar, allí estará siempre presente la radiofrecuencia. Atravesando continentes vía satélite y llegando al planeta entero con información y datos al instante, la radio ha evolucionado sustancialmente desde su nacimiento, pero todo aquello que conocemos y vemos que se enlaza a través del “aire” se hace precisamente a través de este ancestral método: la radio. La telefonía móvil, la televisión, Bluetooth, Zig-Bee, WIMAX, por nombrar algunos, provienen de tecnologías que datan del siglo pasado: la inmortal y siempre vigente onda de radio.
Seleccionando los transmisores a utilizar
En todo el mundo existen, según las legislaciones de cada país, porciones del espectro radioeléctrico destinadas al uso amateur, doméstico y con fines experimentales, en las que se utilizan siempre potencias muy bajas para no provocar interferencias en otros servicios que compartan la misma porción de la “torta” espectral.
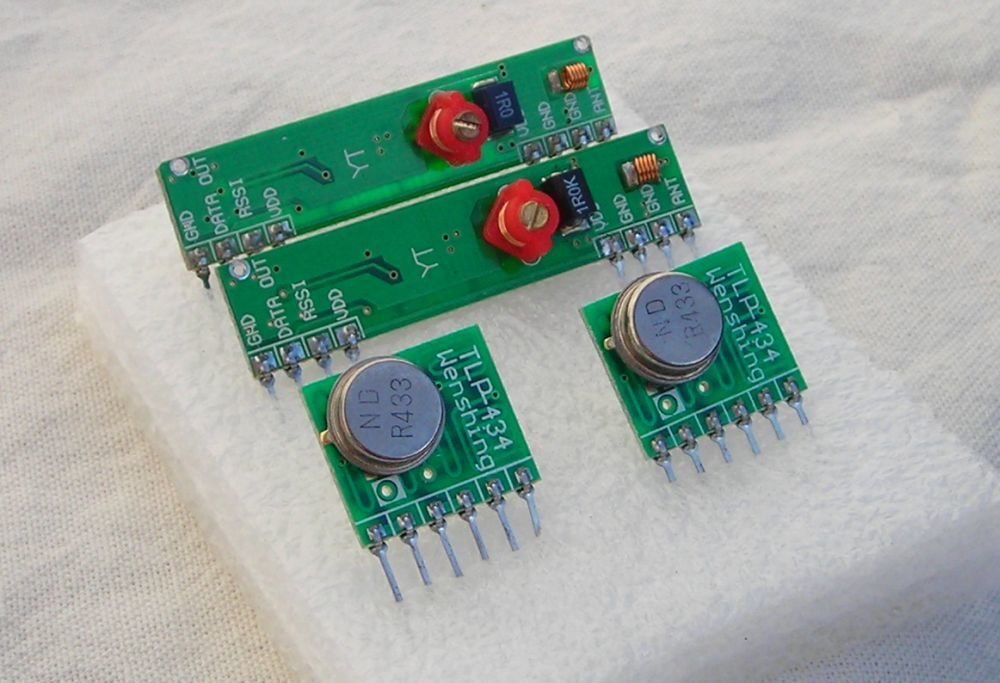
En nuestro caso, utilizaremos unos módulos que vienen específicamente diseñados para trabajar en desarrollos integrados. Dichos módulos son ideales para combinar con microcontroladores y se utilizan para la transmisión de información digital a distancias relativamente cortas (100 metros). Sin embargo, mediante el uso de las antenas que ya hemos aprendido a construir en NeoTeo, transformaremos la distancia del enlace en “varios cientos” de metros. Los módulos por sí mismos no nos ofrecen una cobertura de acción más allá de los 20 metros en espacios abiertos, y menos aún cuando los lugares están divididos en muchos ambientes y cuando la actividad eléctrica es altamente ruidosa, como en una industria.
No pretendamos que nuestro robot tenga el aspecto un Transformer, un humanoide, un androide, la reencarnación de R2D2 o una muñeca de placer. Una máquina herramienta, un sistema de orientación de una cámara remota, un portón de acceso a un predio y muchas otras cosas también se las considera un automatismo remoto. De nuestra pericia de diseño dependerá el grado de inteligencia que poseerán sus acciones y, en consecuencia, los resultados obtenidos. Lo importante será dotar a nuestro “robot” de un sistema de enlace capaz de hacerlo trabajar en forma fiable y segura lo más alejado posible de nuestro emplazamiento.
Recordemos que en esta primera etapa nos dedicaremos a las acciones más sencillas y elementales dentro del mundo del radiocontrol. La transferencia de paquetes de datos, como pueden ser imágenes, archivos de texto y muchas otras formas de transferencia masiva de información, serán objeto de futuros artículos.
Retomando la selección de módulos de RF para nuestros propósitos, encontramos en el mercado (a muy bajo costo) unos módulos que trabajan en distintas frecuencias, según sea nuestra elección. Los más populares trabajan en la banda de UHF y se pueden conseguir en las tiendas por menos de U$S 10. Los modelos más conocidos trabajan en 303,875 MHz (TWS-303), 315 MHz (TWS-315), 418 MHz (TWS-418) y 433,92 MHz (TWS-433). Debido a que el mercado nos ofrece una amplia variedad de fabricantes, las nomenclaturas suelen variar, pero básicamente encontraremos el mismo estilo constructivo de módulo, ya sea transmisor (Tx) (con el identificativo T al comienzo) o receptor (Rx) (identificativo R). En el caso de los receptores, encontramos los modelos de 303,875 MHz (RWS-303), 315 MHz (RWS-315), 418 MHz (RWS-418) y 433,92 MHz (RWS-433), que pueden formar los pares complementarios de trabajo en una misma frecuencia.
Por ejemplo, podemos utilizar un transmisor TWS-433 en conjunto con un receptor RWS-433 en una comunicación Simplex, es decir, cuando comunicamos en un solo sentido, o dicho de otro modo, cuando enviamos instrucciones a un dispositivo y esperamos que éste las reciba y las ejecute correctamente. Por otro lado, tenemos los casos en los que se utilizan comunicaciones Full Duplex, que son aquellas en las que el dispositivo remoto nos devuelve información de la evolución del proceso inducido o nos envía a nuestra central de control informaciones de diversa índole que pueden estar preestablecidas de antemano, como puede ser el nivel de combustible, datos de temperatura del lugar donde se halle dicho dispositivo, la cantidad de energía que le quedan a sus baterías y muchos otros datos que la aplicación requiera.
Por supuesto que en ese caso se utilizará otro juego o conjunto de transmisor y receptor de distinta frecuencia para que no se provoquen interferencias entre los que viajan en un mismo dispositivo. Por ejemplo: en nuestra central de comandos utilizaremos un Tx de 433 Mhz y un Rx de 315 Mhz, mientras que al dispositivo remoto le corresponderá un Tx de 315 Mhz y Rx de 433 Mhz.
Conexionado
El conexionado y las características de los módulos son muy sencillas de interpretar y no suponen demasiadas complicaciones:
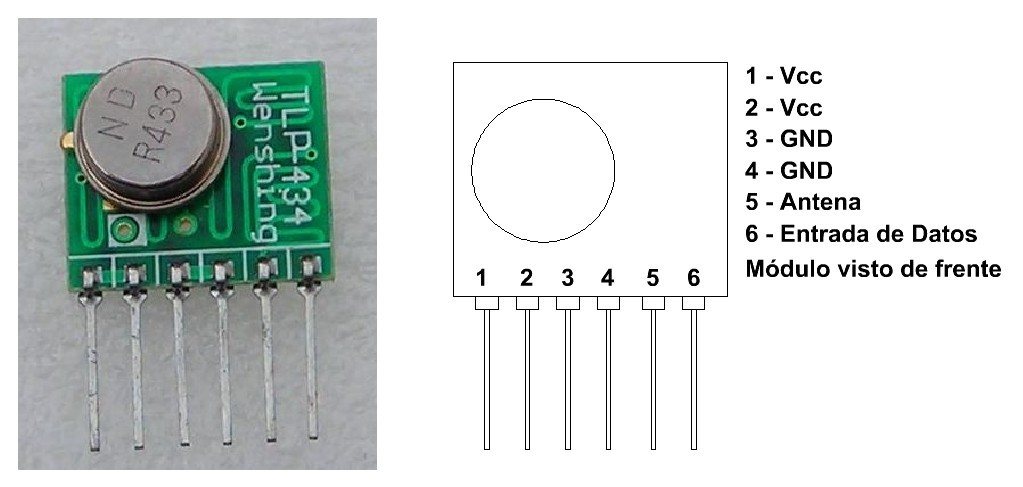
La tensión de alimentación es muy amplia, aunque los valores tradicionales siempre se sitúan entre los 5 y los 9 Volts, según se utilice en un módulo de comandos o en la parte remota y móvil. En cuanto a la corriente, podrás apreciar en el siguiente cuadro que ésta es muy pequeña y no llega a los 10 mA, valor que le otorga un excelente desempeño, ya que su funcionamiento no supone un consumo excesivo de energía desde las baterías. El último dato destacable es la potencia medida en dBm (decibelmetro) que, al poseer una salida típica de 0dBm, transmite con 1mW (un miliwatt) de potencia de RF. El alcance, como ya dijimos, dependerá de las condiciones de antenamiento que podamos proveerle al transmisor.

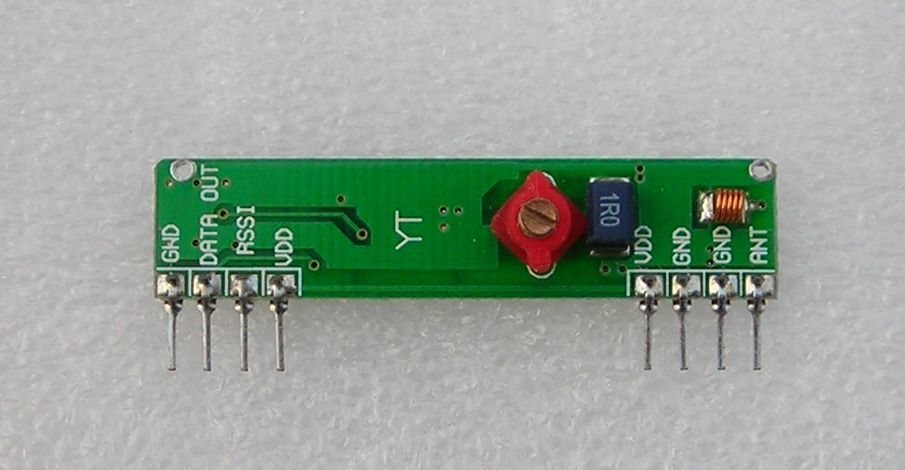
En nuestro caso, el conexionado se simplifica por el lado del receptor ya viene indicado en la serigrafía del circuito impreso. La tensión de alimentación será siempre de 5 Volts; nunca debemos superar este valor porque corremos un serio riesgo de dañar el módulo receptor. El consumo de corriente es muy pequeño y se ubica en los 5 mA, mientras que uno de los parámetros más importantes del receptor – la sensibilidad – posee valores aproximados a los -104 dBm. Y aquí surge una de las grandes preguntas de la humanidad: ¿Cuán sensible es tener -104dBm? ¿Qué distancia equivale a esa cifra? ¿Es mucho o poco? ¿Es un buen valor o es un receptor “sordo”?
Sobre la sensibilidad en un receptor
Los dBm no están estrictamente relacionados con la distancia entre transmisor y receptor. Esta unidad caracteriza cuantitativamente la potencia de una señal tomando como referencia una potencia de 1mW (0 dBm). Por ejemplo: si quieres calcular la sensibilidad en watts de un receptor, teniendo en cuenta que éste tiene una sensibilidad de -110 dBm, debes seguir la siguiente fórmula:
-110 dBm = 10 * log (P(W)/1mW) => P(W) = 0.00000000000001 W
Entonces, el receptor es capaz de captar señales de esa potencia. Otro ejemplo: ahora tenemos una sensibilidad de -104 dBm:
-104 dBm = 10 * log (P(W)/1mW) => P(W) = 0.00000000000004 W
Esto quiere decir que una sensibilidad de -104 dBm requiere una señal 4 veces más potente que una sensibilidad de -110 dBm. Antiguamente, la sensibilidad de un receptor venía dada en microvoltios sobre la antena, considerando a la misma como una antena de ganancia nula. Sin embargo, en la actualidad, las técnicas y procedimientos para medir la sensibilidad de un equipo han cambiado sustancialmente: hoy la sensibilidad de un equipo de radio viene dado por la siguiente fórmula:
S(dBm) = -174dBm++NF(dB)+10*log (B)
donde:
- -174dBm es el "piso" de señal existente en el éter.
- Señal es lo recibido por nuestro receptor con una antena de ganancia nula.
- Ruido es la actividad atmosférica que varía de una banda a otra.
- NF significa "Noise Figure", ruido electrónico generado por las etapas de entrada del mismo receptor, es decir, por la actividad electrónica dentro de los semiconductores.
- B es el ancho de banda utilizable por nuestro receptor.
Ésta es, entonces, la fórmula actual para determinar la sensibilidad de un receptor. Por lo tanto, cuanto más se acerque la sensibilidad de nuestro receptor a esos -174dBm, mejor será la relación señal/ruido, menor será la figura de ruido (NF) y más estrecho será el ancho de banda del canal a utilizar.
Resumiendo el concepto: cuanto más nos acerquemos a -174dBm, más sensible será nuestro receptor. De ahí que con -110dBm podremos recibir a más distancia que con -104dBm; pero debemos considerar que en todos los casos intervienen muchos factores a la hora determinar la distancia que significan esos 6dBm de diferencia, desde las condiciones climáticas (temperatura, humedad, presión, etc.) hasta la altura y el tipo de antenas.
Por último, podemos agregar que el receptor posee una salida indicada en la serigrafía como RSSI, Receive Signal Strength Indication, que en castellano se podría traducir como Indicador de Fuerza de Señal de Recepción, que se encuentra disponible como una tensión analógica que se incrementa a medida que la señal útil en antena aumenta.
Elección de la antena
Como ya se ha mencionado antes, la utilización de una antena externa y “resonante” a la frecuencia de trabajo de los módulos incrementará notablemente el desempeño del enlace y logrará mayores distancias de comunicación. Nunca está de más recordar que una antena no es un metal de cualquier longitud y forma, sino que es una construcción sencilla, pero estricta en lo que respecta a dimensiones, formato y altura de emplazamiento sobre el nivel del suelo circundante.
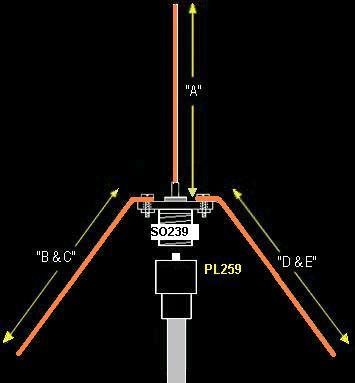
- Las medidas de una antena son muy importantes
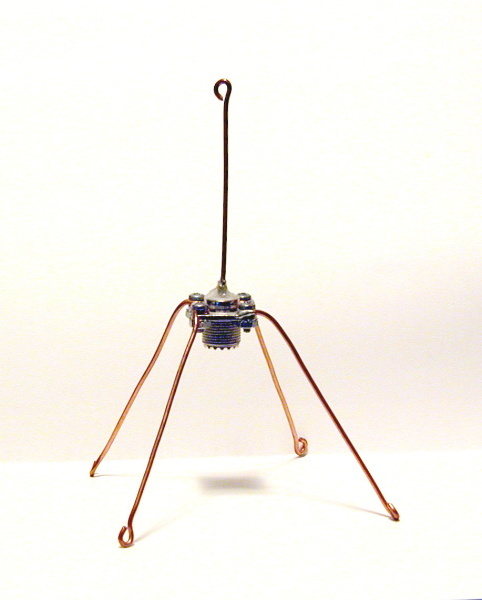
- Una simpática antena Ground-Plane hecha en casa
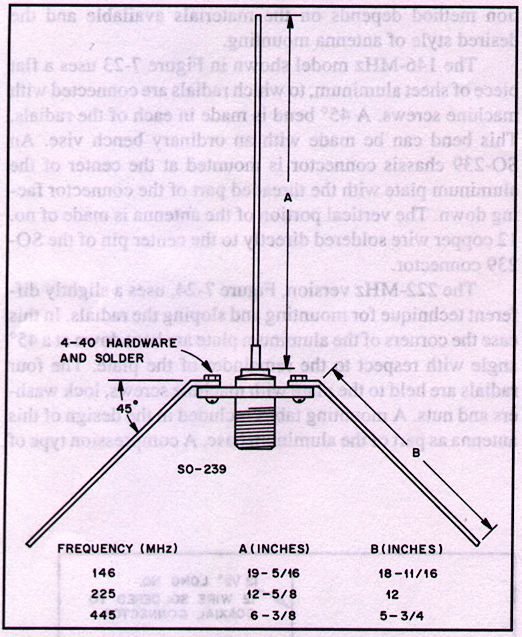
- Distintas medidas para distintas frecuencias (en pulgadas)
La antena Ground Plane, o también conocida como ¼ de onda, será una elección muy apropiada para ampliar la distancia útil de enlace de este tipo de módulos. Aprovecharemos todo lo aprendido en el artículo antes publicado para poder lograr una construcción sólida y eficaz, con un tamaño que no será mayor a los 17 centímetros por cada elemento empleado. Sin dudas, será una antena pequeña, pero práctica y muy eficiente.
Debemos tener en cuenta que la distancia de línea de alimentación o coaxil que utilizaremos para su implementación no deberá superar los 7 metros, para evitar así pérdidas importantes de señal dentro del cable. Por otro lado, las conexiones a los módulos deberán realizarse lo más cortas posible. Cables desnudos de dimensiones inapropiadas, conectores mal soldados, antenas armadas de manera deficiente y alimentaciones inadecuadas a los módulos significarán un mal funcionamiento de éstos y hasta incluso pueden provocar su rotura.
Muy importante: Si nuestra intención no es construir una antena exterior como la mencionada, igualmente debemos colocar en las respectivas conexiones de antena un cable de exactamente 16,6 centímetros de largo para que los módulos de 433 Mhz. puedan trabajar de manera apropiada o lo más parecido a ella. NUNCA debemos dejar un módulo sin antena. El receptor no tendrá una sensibilidad útil de trabajo y el Tx correrá el riesgo de quemarse al no poder entregarse energía al exterior.
Comunicando
Los módulos no utilizan tensiones fijas y continuas en las entradas de datos sino que requieren de impulsos bien definidos y estructurados, como los entregados por un microcontrolador o un codificador del estilo del Holtek HT12E. Es decir, si pretendemos recepcionar algo con el mero hecho de conectar una entrada de 5 Volts al Tx, estaremos perdiendo el tiempo. Muchas personas creen que haciendo esta acción se obtendrá un estado alto a la salida del receptor y que, colocando a GND la entrada de Tx, ocurrirá lo mismo con la salida de Rx. Actos totalmente erróneos.
La forma de hacerlo, entonces, es programando un PIC para conectar al Tx y otro para el RX que se encargue de decodificar la información enviada y accionar los mecanismos deseados.
El PIC necesario para realizar un comunicado de esta naturaleza no debiera suponer la utilización de un dispositivo de alta gama (PIC 24F, 30F, dsPIC, etc.), ni siquiera de gama media (PIC18F, PIC 16F). Con un sencillo 12F675, podemos organizarnos en un control de mandos inicial que pueda satisfacer nuestros primeros requerimientos experimentales hasta lograr dominar las técnicas de la radiofrecuencia.
El método a utilizar para enviar los datos a través del éter es la conocida comunicación serie que en BASIC podemos encontrar resumida en la potentes instrucciones RSOUT y RSIN. Al utilizarlas debemos tener la precaución de ajustar los mismos parámetros en el Rx como en el Tx, para obtener un enlace satisfactorio. Los parámetros más importantes son: la velocidad de transferencia de datos, que viene expresada de la misma forma que en cualquier comunicación serial y que nosotros elegiremos en 2400 bps, la separación entre caracteres enviados/recibidos, el tiempo de espera de los datos en el receptor y, por último, los pines de cada microcontrolador que conectarán los datos a los respectivos módulos de RF.
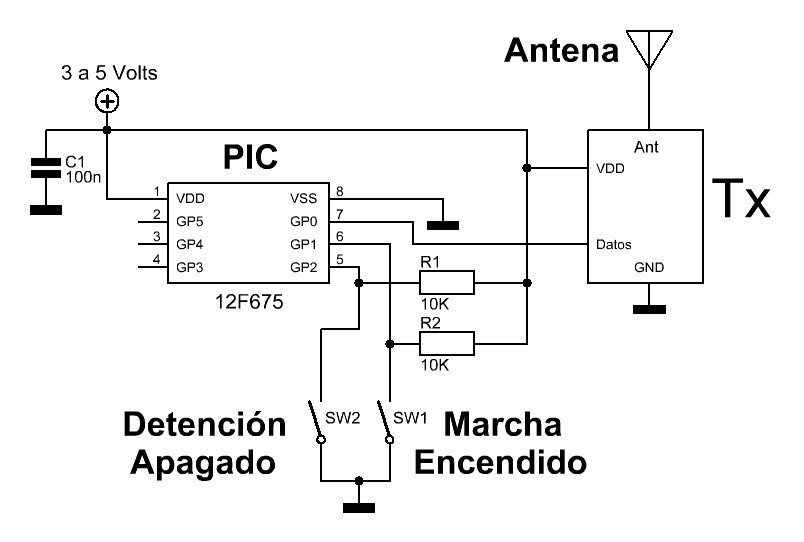
En el ejemplo del transmisor utilizaremos un par de pulsadores para ejemplificar una acción de conexión / desconexión de cualquier sistema en nuestra unidad remota, como puede ser una luminaria, un LED, un motor o cualquier otro dispositivo que nos sirva para comenzar y dar los primeros pasos en el dominio de la técnica de comandos inalámbricos. También podemos usar los pulsadores para encender LEDs individuales y activarlos de manera momentánea.
Recuerda que nunca vamos a entregarte un programa hecho a la medida de tus necesidades, sino que siempre nuestros listados de programas serán genéricos y tú deberás adaptarlos a las necesidades, usos y requerimientos de las aplicaciones que construyas.
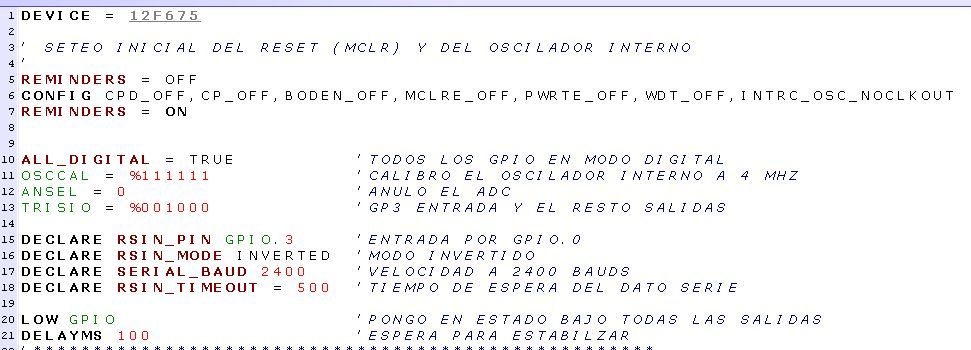
Al comenzar el listado definimos el tipo de microcontrolador a utilizar y, en este caso, no determinaremos la frecuencia del oscilador de cuarzo ya que no lo emplearemos, sino que utilizaremos el oscilador interno que nos ofrece el microcontrolador. Verás en el diagrama esquemático que tampoco hemos incluido la conexión de RESET. El 12F675 nos brinda la posibilidad de maximizar la aplicación de I/O (en este caso llamadas GPIO) utilizando una correcta calibración de la configuración inicial del dispositivo a través de la palabra CONFIG. Es decir, el Reset inicial y el oscilador interno se ponen en funcionamiento mediante esta instrucción.
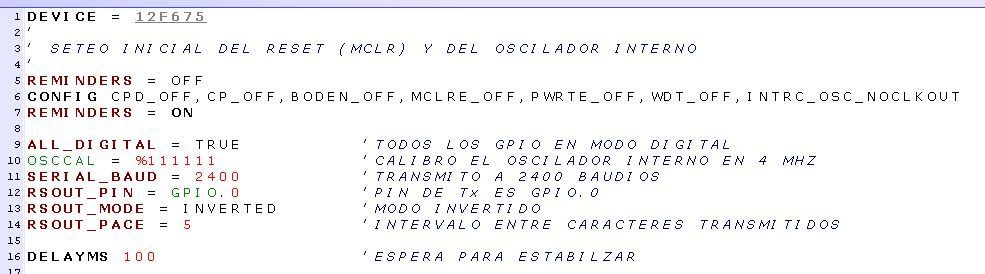
Una vez calibrado el microcontrolador que utilizaremos para transmitir, se procede a trabajar con la instrucción RSOUT. Una de las ventajas que nos ofrece el uso de este comando es la posibilidad de enviar al terminal receptor, junto con la “instrucción propiamente dicha”, un conjunto de caracteres tipo “string” que sirvan de “punteros” o “indicadores” inequívocos de direccionamiento. Es decir, enviaremos una palabra para decirle a nuestro sistema o robot (ubicado entre una decena de similares) “A ti te estoy hablando”.
Esta técnica, que ya hemos visto en Domótica, nos permitirá hacerle llegar las instrucciones necesarias a nuestro robot sin interferir a otros que se encuentren a su alrededor. A esto lo haremos sencillamente escribiendo RSOUT “NEOTEO”, BYTE
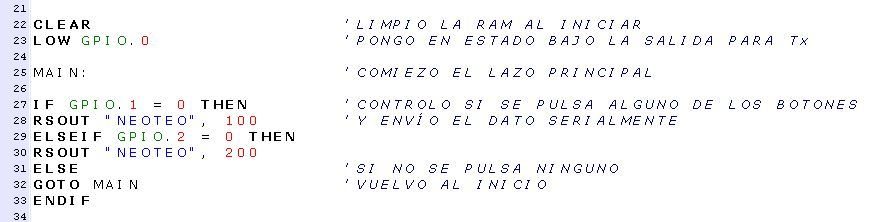
Es decir, el receptor deberá estar programado para recibir la palabra mágica “NEOTEO” y así darse por aludido y decir “Es a mí a quien hablan” para luego leer el BYTE enviado que será la instrucción decidida. De esta forma, se asegura totalmente la comunicación evitando falsos comandos provocados por otras transmisiones existentes en la zona o por ruidos que pueden aparecer en el éter.
La cadena de impulsos, o lo que también podemos llamar tren de datos formados por unos y ceros creados a partir de la transmisión serie de la instrucción RSOUT, son una codificación muy segura y más que suficiente para nuestros propósitos.
Por último, la conexión del receptor será también muy elemental. Se basará en el mismo microcontrolador y quedará construida de la siguiente forma:
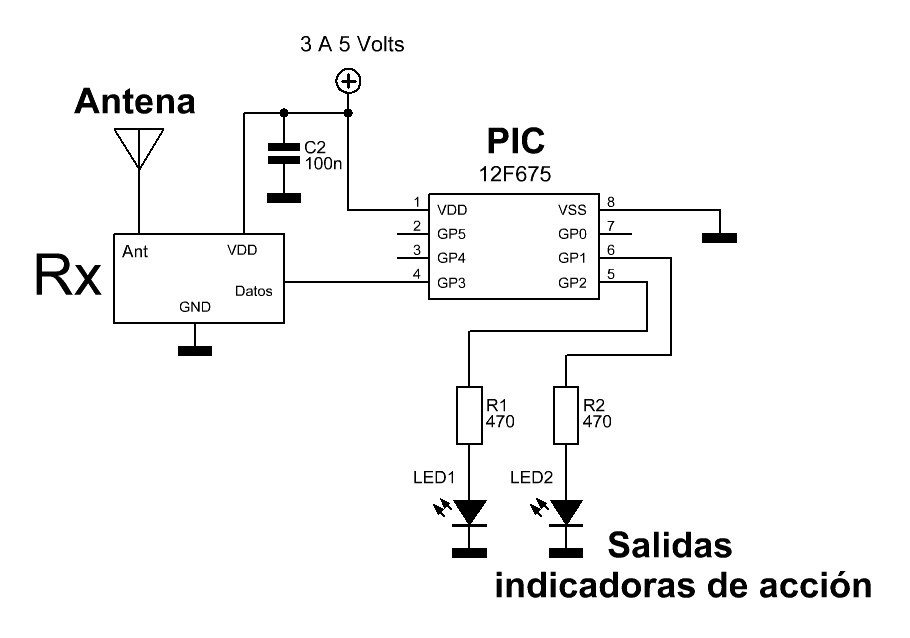
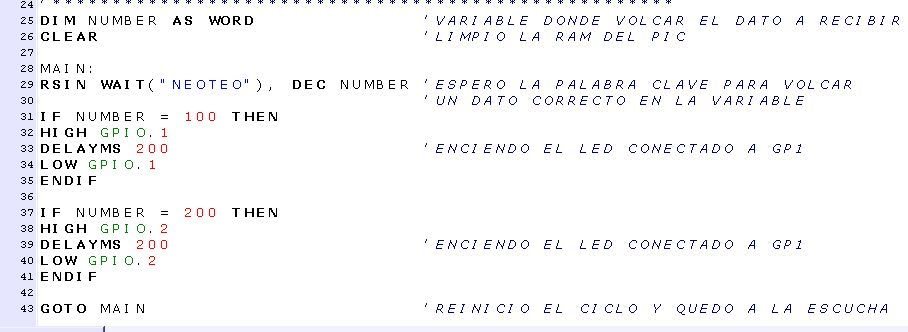
Por su parte, el programa cargado en el microcontrolador receptor que posee su entrada de datos por GP3 deberá esperar [WAIT] la palabra “NEOTEO” para saber si es a él a quien le corresponde la transmisión recibida, ignorando así otras transmisiones no destinadas a él. Además, el inicio del listado deberá contemplar los ajustes de la configuración del microcontrolador, tal como lo hicimos en el caso del transmisor para el reset y el oscilador interno del microcontrolador.
Luego, y para finalizar, viene la sencilla espera de la palabra clave que hayamos seleccionado para nombrar a nuestro sistema remoto y volcar dentro de una variable BYTE el dato recibido. De acuerdo al valor del dato, corresponderá una acción u otra. En nuestro caso, hemos armado un pequeño programa donde encendemos un par de LEDs que creemos te será muy útil para descubrir infinidad de cosas que puedes gobernar a distancia.
Resumen Final
A lo largo de todo el artículo te hemos transmitido muchos conceptos fundamentales para lograr una apropiada comunicación y/o enlace con sistemas operados en forma remota. Hemos analizado los módulos de UHF más populares del mercado, sus características técnicas y sus “secretillos” para obtener el mejor rendimiento de ellos. Además, hemos visto cómo conectarlos a una antena y cómo construir la misma. Por último, también abordamos la programación de los microcontroladores que se pueden utilizar para armar un sistema elemental. Es decir, los conceptos fundamentales están todos presentados y explicados en forma detallada.
Ahora depende de ti, de tu imaginación, de tus ganas de aprender y de ahondar en este mágico mundo de los robots que comenzamos a ver en esta clase de artículos.
De tus preguntas, inquietudes, sueños y ansias de saber un poco más cada día dependerá que en NEOTEO nos sigamos ocupando de estos temas. Luego vendrán los servomecanismos y los movimientos articulados para estar cada vez más cerca de nuestro propio robot. Estamos para escucharte y leerte; cualquier inquietud que tengas puede ser el disparador de una idea cristalizada en un nuevo proyecto.


Muchas gracias Mario.
Este artículo me sirvió para darme cuenta que no es tan complicado este tema de las radiofrecuencias. Ahora si, me animo a comprar uno de estos módulos para experimentar.
Felicidades por lo profesional de tu articulo, tengo mucho tiempo de leer diariamente Neoteo y son articulos como este lo que hace que regrese una y otra vez por saber mas de estos temas que a todos nos encantan.
Buen dia Mario:
Que excelente articulo, la verdad se ve tan sencillo realizarlo que no lo creo hasta que no lo realice. Y pues como dices, la imaginacion empieza a volar con la cantidad de cosas que se pueden hacer. Ademas me gusta mucho que explicas el concepto y depues la aplicacion, asi de esta manera se aprende y se coloca en practica lo aprendido. Y por ultimo rematas con que van a seguir saliendo articulos como estos y mejores, pues nos vas a tener pegados esperando el proximo.
Muchas gracias por estos articulos, gracias Neoteo por existir.
Muchas gracias Mario Sacco por esta publicación
¿Tienes algún sitio web? Como sugerencia, seria gran idea que colocarás tus publicaciones en un foro, de esta manera se expandiría a un mas la info.
Foro en castellano, PICs, FreesCale, otros
http://www.todopic.com.ar/foros/index.php
http://www.ucontrol.com.ar/forosmf/index.php
Gracias a todos por los comentarios !!!
Alimenta mucho el espíritu y son las señales que uno necesita para saber que se está en la buena senda.
Gracias ! Saludos Cordiales a todos !
Excelente, sabia de eso modulo pero no sabia como funcionaba desde punto de vista como hacerlo trabajar con un PIC. Ahora lo veo claro gracia MARIO esta genial
Hola, soy totalmente nuevo en el tema de robotica y tengo muchas granas de empezar a construir mi propio robot. La pregunta que me hago es, por donde empiezo? Se empieza por aca (este articulo). O han publicado anteriomente otros articulos relacionados a como hacer un robot?
Muchas gracias de todos modos al editor porq me ha hecho dar mas ganas aun de construir mi propios proyectos.
saludo
Genaro
Excelente,como siempre, Neoteo me sorprende con sus articulos,.que me dicen de la contruccion de una parabolica para ver gratis la tv,,
Quiero una Aoi – Orient Doll
Buen dia a todos:
Alguien sabe de casualidad de donde puedo descargar el software PIC SIMULATOR IDE sin necesidad de instalar lincencia, de la pagina oficial se tiene un maximo de 120 dias para pagar y pues se me hace dificil porque no tengo tarejta de credito.
Gracias por su ayuda.
haz utilizado los rfPIC, son tan faciles de usar como estos que describes aqui?
es decir solo mando la transmision serial por el pin de datos??
Gracias esta fantástico
Hola, me podrías facilitar alguna bibliografía para leer de la antena que comentas?? es que el post de este foro, no comenta algunos datos técnicos… gracias!
Hola, yo intenté este proyecto, con un pic. de antenna le puse un alambrito, el problema que tengo, es que aunque no se transmita nada desde el transmisor, el receptor recibe y recibe, no se por qué, … saludos y gracias
buenas a todos….. tengo una pregunta yo utilizo picbasicpro para programar y en este las instrucciones para transmicion de datos en forma serial son serout(envia), serin(recepta)
no se si sera iguales a los utilizados en este proyecto es decir los comandos RSOUT y RSIN loq no comprendo es como puedo utilizr los q yo utilizo gracias x su ayuda
Hola mira tengo que realizar un circuito mas omenos como el tuyo pero ql pic que yo utilizo es el 16f28a y el programa de programacion lo realizo en el C++ o en el Basic pero una pregunta que otro proyecto similar al tuyo me recomendarias…………….pues el tuyo esta muy bueno si puedes responde lo antes posible.
Gracias…………
Hola, primero que todo te felicito por el buen artículo, me interesa mucho el uso del radio control para un proyecto en mi universidad, pero yo trabajo en C usando el MPLab IDE, te recomiendo si me ayudas con las consideraciones que debo tener en cuenta al pasar el código de Basic a C, especialmente con el uso de las instrucciones RSOUT y RSIN. Te agradezco inmensamente de antemano.
mm saludos a todos. Alguien sabe de un modulo para transmitor video digamos unos 150 metros me doy por bien servido je je de antemano gracias…
Muy buen tutorial me encanto solo que tengo una duda EN DONDE PUEDO CONSEGUIR ESOS COMPONENTES EN MEXICO? CUALKIER ESTADO DE LA REPUBLICA NO IMPORTA por mas que busco en internet no logro encontrar una tienda en donde si los vendan y en mi ciudad no hay.
TRANSMISOR 418MHZ TX TWS-BS-418 (ALCANCE 30M)
RECEPTOR 418MHZ RX RWS-374-5 (ALCANCE 30M)
holas brothers felicidades por el articulo realmente me sirve de mucho!! era esta informacion que estube buscando ch una rechuro que DIOS les bendiga muchas gracias 😀
holas brothers felicidades por el articulo realmente me sirve de mucho!! era esta informacion que estube buscando ch una rechuro que DIOS les bendiga muchas gracias 😀
holas brothers felicidades por el articulo realmente me sirve de mucho!! era esta informacion que estube buscando ch una rechuro que DIOS les bendiga muchas gracias 😀
holas brothers felicidades por el articulo realmente me sirve de mucho!! era esta informacion que estube buscando ch una rechuro que DIOS les bendiga muchas gracias 😀
Gracias!! Muy buena informacion!!
Amigo estoy haciendo un proyecto muy similar con los integrados TWS-BS-6 y RWS-374 de 315 Mhz pero cuando los conecto recibo puros caracteres basura ya probe cambiando el largo de las antenas anque no de manera exacta ya no se que hacer te pido porfavor si pudieras ayudarme
Saludos y GRACIAS
Hola buenos días, es super interesante toda la información suministrada, de verdad les felicito, me ha sido de gran ayuda.
Estaba navegando para buscar una mejor antena para estos modulos. Recientemente no me quedo otra y se lo puse a un auto a RC para reemplazar el TX que venia de fabrica. Me dio mucho dolor de cabeza no hacerlo funcionar bien hasta ahora… ya le puse una bateria de capacitores pero no funciona al 100% tiene poco alcance y cuando activo el giro y el motor de marcha se corta por el pico de consumo. he probado con otra bateria separada y si funciona pero el consumo o ruido de los motores me esta matando. Estoy usando los SM6135 que son mejores o iguales a los ht12e/d. Y comence a hacer algunas pruebas con manchester porque con el puerto serie directo no da muy buenos resultados. Saludos.
puedo enviar señales análogas con estos tlp 434??? y mas o menos cuanto seria el alcance??? gracias…
Hola buenas tardes, disculpa, en que lenguaje lo estas programando? Espero me puedas contestar gracias!
MUY BNOS DIAS…. DISCULPE BROTHER… Q COMPILADOR EN ESPECIFICO UTILIZO PARA DICHOS PROGRAMAS? ESAS INSTRUCCIONES SE PUEDEN USAR CON EL 16F877?? LE AGRADEZCO
Oye disculpa amigo tengo una duda… cual es la distancia que tiene asi tal cual, como viene el transmisor, sin necesidad de utilizar una antena…
Y me podrias facilitar el pdf de esos datos por favor.
Saludos y muchas gracias.
Muy bueno!
Quisiera saber si me puedes ayudar, estoy utilizando un módulo en el que el receptor trae 2 pines de data, no sé cuál de los dos debo utilizar o si se usan los 2. Según he leído en algunos uno da el dato recibido y el otro una señal analógica que indica la señal que tiene. Pero no sé si será así o ambos me dan el dato recibido. Si alguien sabe cómo es agradeceré su respuesta
Hola que tal, soy de Mendoza- Argentina. Primero felicitar por la claridad de la explicación. Segundo saber si la longitud de 16,6 cm de la antena incluyen también al cable que conectará al pin del receptor con la salida de antena (por ejemplo una ficha). saludos y gracias!!
Muy bueno de donde puedo descargar los archivos con el codigo de este proyecto, zalguien lo realizo o simulo en proteus??? alguien puede subir los archivos en algun servidor, gracias