
Las plantas carnívoras han crecido en popularidad ya que existe mucha gente que las considera como una alternativa natural a los insecticidas hogareños. Pero lo que nos llama la atención aquí no es la planta en general, sino el mecanismo que utiliza para alimentarse. En el pasado ya habíamos oído sobre desarrollos robóticos capaces de obtener energía a partir de material orgánico, pero ahora se trata de un robot con la capacidad de atrapar a un insecto y, con el desarrollo suficiente, digerirlo para convertirlo en electricidad.
Cualquiera que siga de cerca publicaciones o sitios relacionados con ecología y desarrollo sustentable encontrará de forma periódica ejemplos de reutilización de desechos para obtener energía. Aquí en NeoTeo hemos mencionado a algunos de ellos: El primero que viene a mi mente es el del coche alimentado con café después de haber sido usado, pero el potencial de todo el material orgánico de desecho es enorme. Ahora, lo que nos trae aquí hoy no son desechos, sino insectos. Existe una enorme cantidad de seres que dependen de los insectos para sobrevivir. Uno de esos seres es la planta carnívora (en sus múltiples especies). Para muchas personas es admirable la forma en la que la planta atrae a su presa (de la cual obtiene nutrientes, pero no energía), y también están aquellos que las usan para control de insectos, aunque en general estas plantas requieren de mucha atención y delicadeza a la hora de cultivarlas. Sin embargo, ¿qué pensarías si un robot pudiera imitar a una planta carnívora, pero en vez de obtener nutrientes de su presa, la convierta en energía?
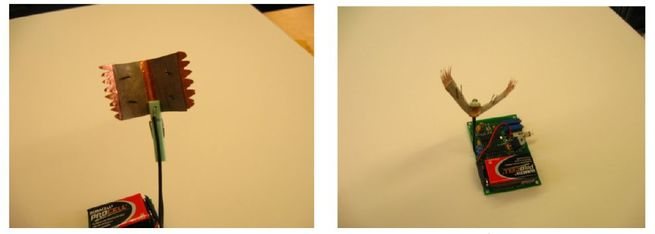
Aunque la parte de la digestión no ha sido aplicada aquí, en lo que se refiere a la “mecánica” de la captura, encontramos dos desarrollos: Uno proviene de la Universidad Nacional de Seúl, a cargo de Seung-Won Kim y su equipo. Utilizan una pieza de fibra de carbono a modo de “hojas”, conectada a un resorte metálico “con memoria” que reacciona con el peso del insecto. El otro desarrollo fue llevado a cabo por Mohsen Shahinpoor de la Universidad de Maine, pero a diferencia del trabajo de Seúl, recurre a membranas de polímero (músculos artificiales) para imitar a las hojas, cubiertas con electrodos de oro. Cuando una corriente viaja por la membrana, se dobla en una dirección, generando lo opuesto cuando se invierte la polaridad.
A pesar de las claras diferencias, estos desarrollos nos hacen recordar al británico EcoBot y al proyecto EATR de DARPA. ¿Qué puede llegar a salir de todo esto? El tatara-tatarabuelo del “Señor Fusión”… o una extraña versión robótica de “Soylent Green”. La idea de reutilizar desechos para convertirlos en energía y aplicarla a casi cualquier cosa siempre es buena, pero que un robot pueda capturar a un insecto y utilizarlo para mantenerse en funcionamiento enciende una muy pequeña luz de alarma. Los responsables del robot EATR debieron salir a declarar que la misión del robot no es alimentarse de humanos… pero seguimos siendo biomasa, ¿cierto?


Verdad que da miedo…:)) bueno alla mis nietos, seran ellos los que se las arreglaran con skinet, la matrix etc. etc. 😛
pues si asi vamos mis bis nietos tandran q encargarce de skine
Tecnologia primitiva…. en Matrix podian convertirnos en energia sin nesecidad de "destruirnos", aun falta para Matrix, pero un paso mas cerca de "Termineitor"
Esto mas que recordarme a "Skynet" o "The Matrix", (o como menciono un compañero "Termineitor"), esta linea de investigación me recuerda mucho a la pelicula "Screamers", que si no recuerdo mal esta basada en una novela de Philip K. Dick (quien era paranoico en sus novelas, "piensa mal y acertaras…"), que mas puedo decir, la ciencia ficción de antes, es la ciencia fáctica de hoy…
Saludos.