




Estos dispositivos son considerados una de las materias primas en el diseño y la construcción de los robots. Si combinamos y administramos los movimientos en un montaje mecánico adecuado, un grupo variable de servomotores puede dar motricidad y locomoción a sistemas controlados de manera local o remota. Desde pequeñas aplicaciones didácticas hasta el más complejo diseño robótico. Los límites son tu imaginación y tus ganas de aprender.
“Dadme un punto de apoyo y moveré al mundo” habría dicho Arquímedes de Siracusa, arrastrado quizá por un entusiasmo desmedido ante su descubrimiento de la ley de la palanca. A partir de allí comienza la historia de las máquinas simples, y el dispositivo que veremos y aplicaremos hoy en este artículo es un buen ejemplo de ello.
Un servomotor es básicamente un actuador mecánico basado en un motor y un conjunto de engranajes que permiten multiplicar el torque del sistema final, el cual posee elementos de control para monitorear de manera constante la posición de un elemento mecánico que será el enlace con el mundo exterior. Es decir, ante una acción inducida electrónicamente a un servomotor, obtendremos por resultado una respuesta mecánica controlada. Por ejemplo, los motores que forman parte de una impresora, junto a los sistemas de control de avance o retroceso del papel, forman un servomotor.
Las aplicaciones de estos sistemas esclavos se pueden observar mayormente en aeromodelismo y robótica, pero no son exclusivos de estos usos. Cualquier sistema que requiera un posicionamiento mecánico preciso y controlado dependerá de un servosistema o servomecanismo, actuado, por supuesto, por un servomotor. El zoom de una cámara, el autoenfoque de un conjunto óptico, un sistema de movilización de cámaras de vigilancia y hasta las puertas automáticas de un ascensor son sencillos ejemplos de su aplicación.
El motor posee la característica de girar a una buena velocidad, la cual disminuye por los juegos de engranajes de la caja reductora que aprovechan esta velocidad para transformarla en fuerza de trabajo. Al girar el último engranaje acoplado al eje de salida obtenemos una velocidad notablemente reducida, a pesar de que, dentro del sistema, el motor está girando a altas velocidades.
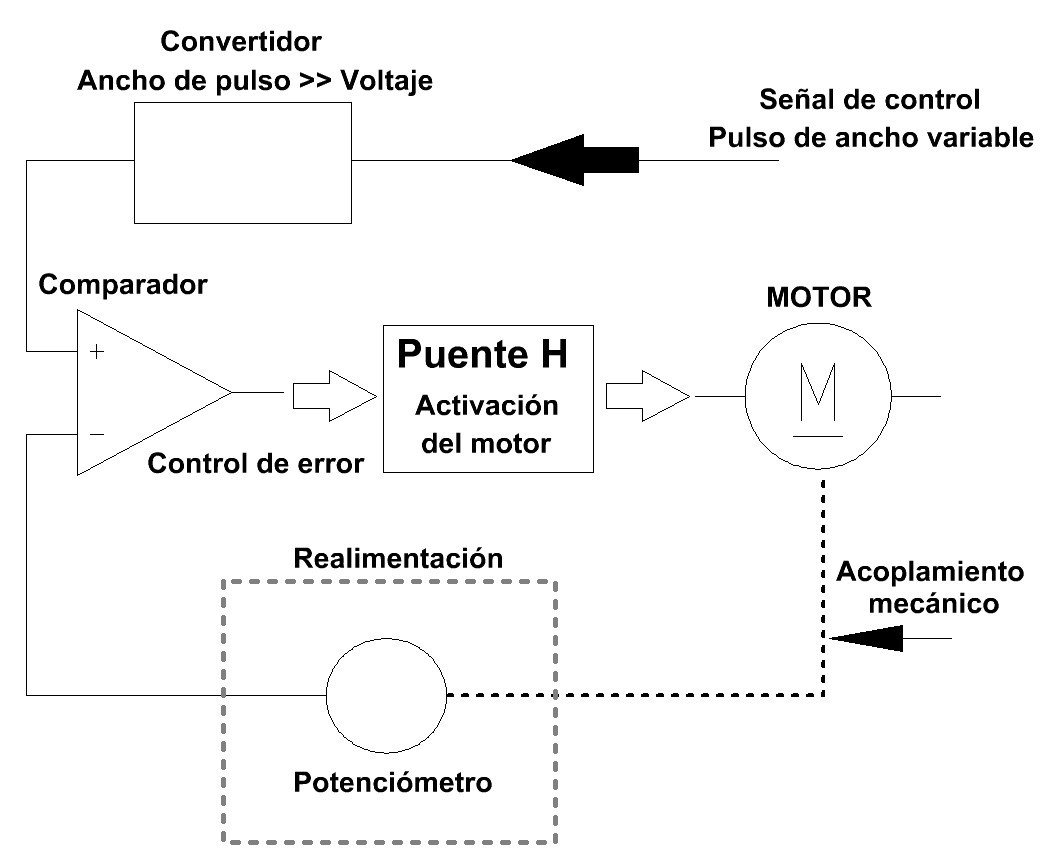
Además, en esta última rueda de acoplamiento encontraremos topes o límites de recorrido para entregarnos en la salida final un giro de 180° del brazo actuador. En la mayoría de los servomotores, este desplazamiento angular es “copiado” por un potenciómetro incorporado al sistema de control y solidario en forma mecánica al eje externo. Este sensor resistivo se encargará de informarle al sistema la posición que posee el actuador exterior para así controlar con exactitud que la instrucción de posicionamiento enviada esté siendo ejecutada fielmente.
Conectando un servo
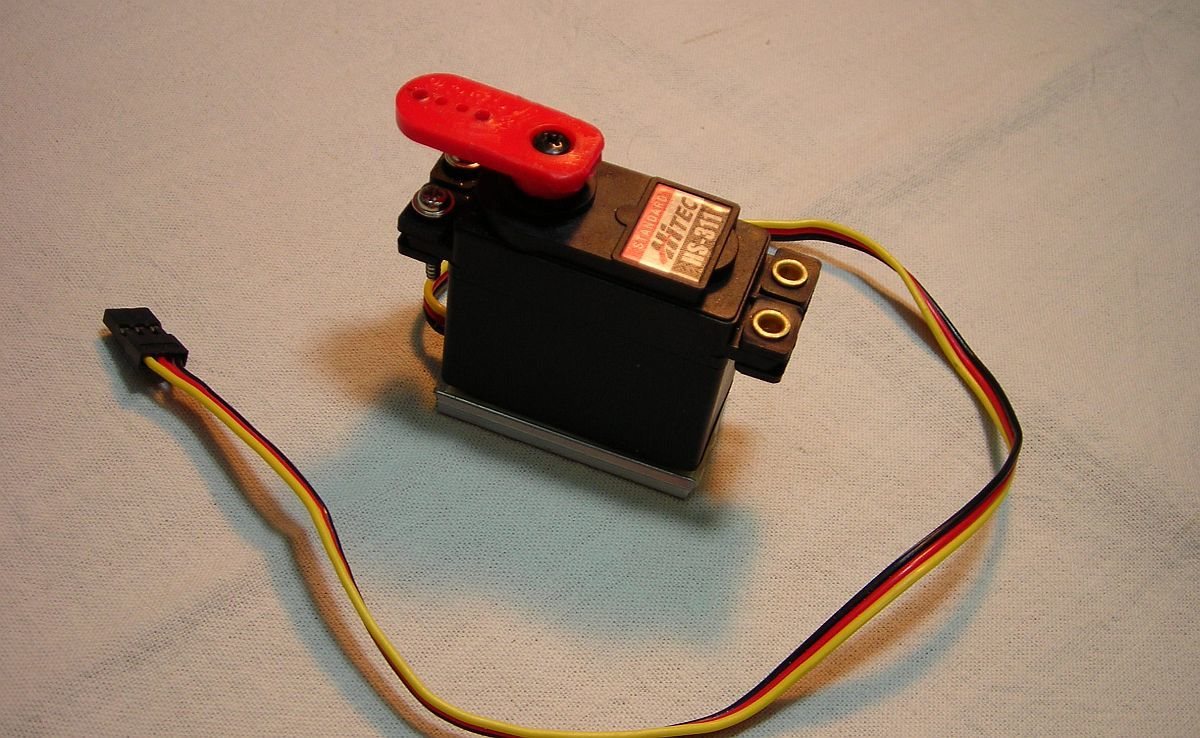
Las conexiones son muy sencillas y se basan en una normativa de colores muy elementales que involucran al Rojo como positivo de la alimentación principal, junto a otro cable que puede ser de color Negro o Marrón y que, por lógica, podemos deducir que se trata del negativo de alimentación. Un tercer cable, correspondiente al control de posicionamiento del actuador mecánico, es Amarillo o Blanco. En la primera imagen se puede apreciar el conjunto de colores Rojo – Negro y Amarillo para la conexión en servomotores de la marca HITEC.
La tensión de trabajo de los servomotores suele estar comprendida entre los 3 y los 7 Volts, siendo 5 Volts la tensión que se utiliza en la mayoría de las aplicaciones fijas donde interviene una fuente de alimentación conectada a la red de energía domiciliaria, y 6 Volts para los casos de alimentación a baterías cuando se trata de equipos móviles. En todos los casos, siempre se requiere de una señal de control de 5 Volts de amplitud.
La señal de control del servo
Como mencionamos al principio, los servomotores se controlan mediante impulsos de ancho variable que deben refrescarse periódicamente. Esto significa que si dejamos de enviar la señal de control en el tiempo en el que el servomotor lo necesita, éste (a pesar de estar energizado) dejará de mantenerse en la posición preestablecida y adoptará cualquier orientación regida por el esfuerzo al que esté sometido. Es decir, si no mantenemos la señal de control en forma efectiva todo el tiempo que sea necesario, el sistema quedará a merced de las fuerzas externas a la que sea sometido. Por ejemplo, un brazo de palanca dejará de sostener un objeto y se dejará caer todo el trayecto mecánico que pueda recorrer, o un sistema erguido en vertical se caerá hacia atrás o hacia adelante al momento en el que el servomotor deje de “sostener” la aplicación en la posición preestablecida.
Para bloquear al servomotor en una posición es necesario, entonces, enviarle continuamente la señal con la posición deseada. De esta forma, el sistema de control seguirá operando y el servo conservará su posición y se resistirá a las fuerzas externas que intenten cambiarlo de posición.
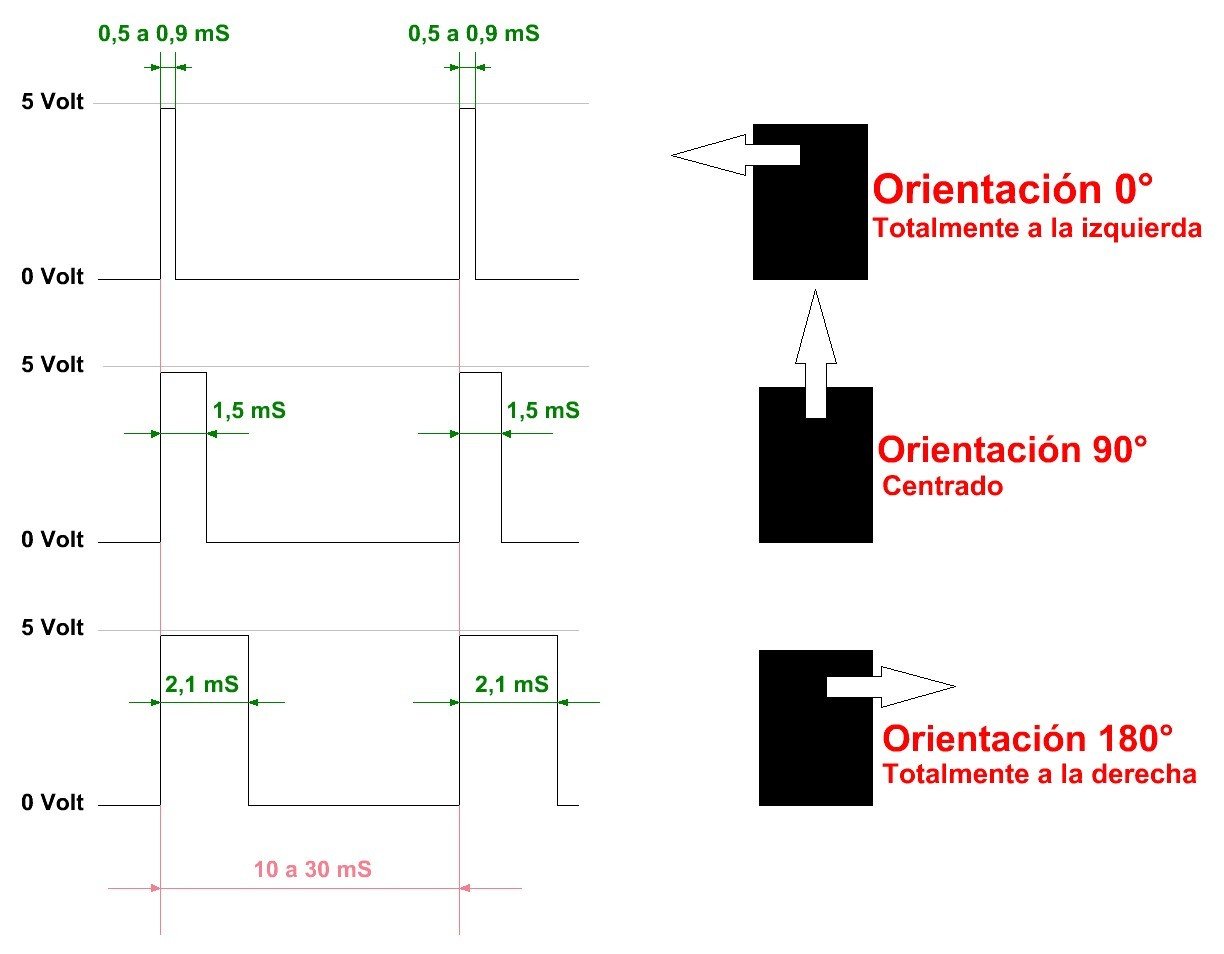
El refresco se realiza habitualmente con una frecuencia de 50 veces por segundo, pero es normal y efectivo trabajar entre los 10 y los 30 milisegundos, tal como muestra el diagrama. Por otro lado, el ancho del impulso, es decir, su tiempo de duración, dará la posición u orientación del actuador mecánico. En este punto en particular, es decir, cuando se está constantemente atento a enviar un impulso de duración exacta para evitar oscilaciones mecánicas indeseadas, se centra la complejidad y la cautela al trabajar con servomotores.
Si para el control de uno de estos sistemas utilizamos un microcontrolador que además de actuar sobre el servomotor deba realizar otras actividades, se nos planteará siempre el temor de no lograr actuar en los tiempos requeridos por estos sistemas. Sin embargo, la clave de un funcionamiento satisfactorio y de una realización sin mayores complicaciones se basa en la utilización de un cristal de alta frecuencia (20 Mhz) para poder ejecutar todo el trabajo adicional que sea necesario hasta que llegue el momento de refrescar nuevamente el impulso de control del servomotor. Esto debe ir acompañado, por supuesto, de la observación cuidadosa del diagrama de tiempos de nuestra aplicación.
Moviendo un servo en BASIC
Este trabajo es extremadamente sencillo de realizar en este lenguaje. Bastará con escribir la instrucción SERVO Pin, Posición y el sistema se posicionará de manera automática con la orientación indicada. Pin corresponderá a la I/O digital del microcontrolador donde conectaremos la señal de control requerida por el servomotor, mientras que Posición corresponderá a una variable del tipo WORD, siendo valores habituales para esta variable los siguientes: 1500 para el centro, 500 para el extremo de inicio y 2500 para el extremo de final de carrera del actuador.
Por ejemplo, un listado muy sencillo sería el siguiente:
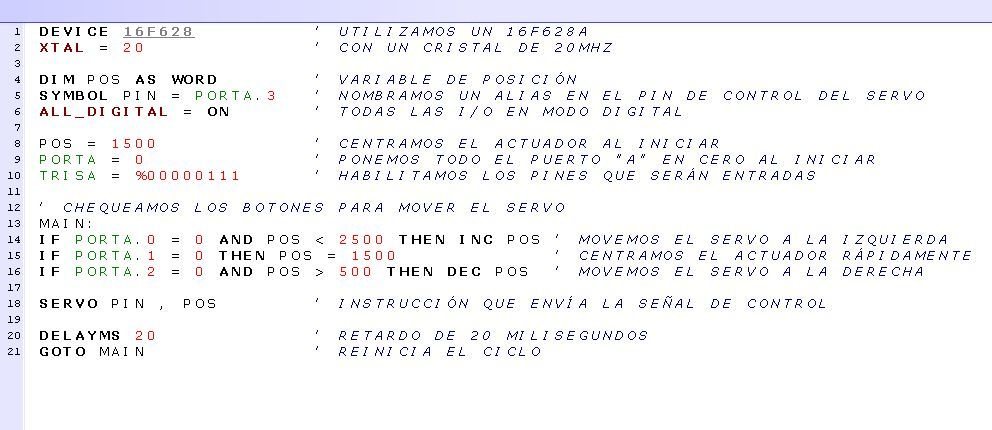
A partir de un simple listado como el anterior, podemos controlar cámaras de vigilancia, llaves de paso de fluidos, cambios de vías en ferromodelismo y un sinfín de aplicaciones. Incrementando o decrementando la variable POS, según el pulsador que actuemos, lograremos un movimiento hacia un lado o hacia el otro, manteniendo los límites expresados en el párrafo anterior. Por último, tenemos un tercer pulsador que nos permite reiniciar rápidamente el movimiento recuperando la posición central del actuador.
En los videos de demostración veremos en acción la instrucción SERVO. La primer reforma que se nos viene a la mente es la de acelerar el movimiento, reemplazando las instrucciones INC y DEC, que varían de a una unidad, por otras variantes más rápidas como POS = POS + 5, por citar un ejemplo.
Tu sistema de vigilancia comienza aquí
Movilizar dos servomotores nos permitirá lograr una prestación de movimientos muy importante, ya que sabiendo combinar mecánicamente los dos dispositivos intervinientes, el recorrido pasará de una trayectoria lineal a otra 2D (dos dimensiones), con las grandes ventajas que ello significa.
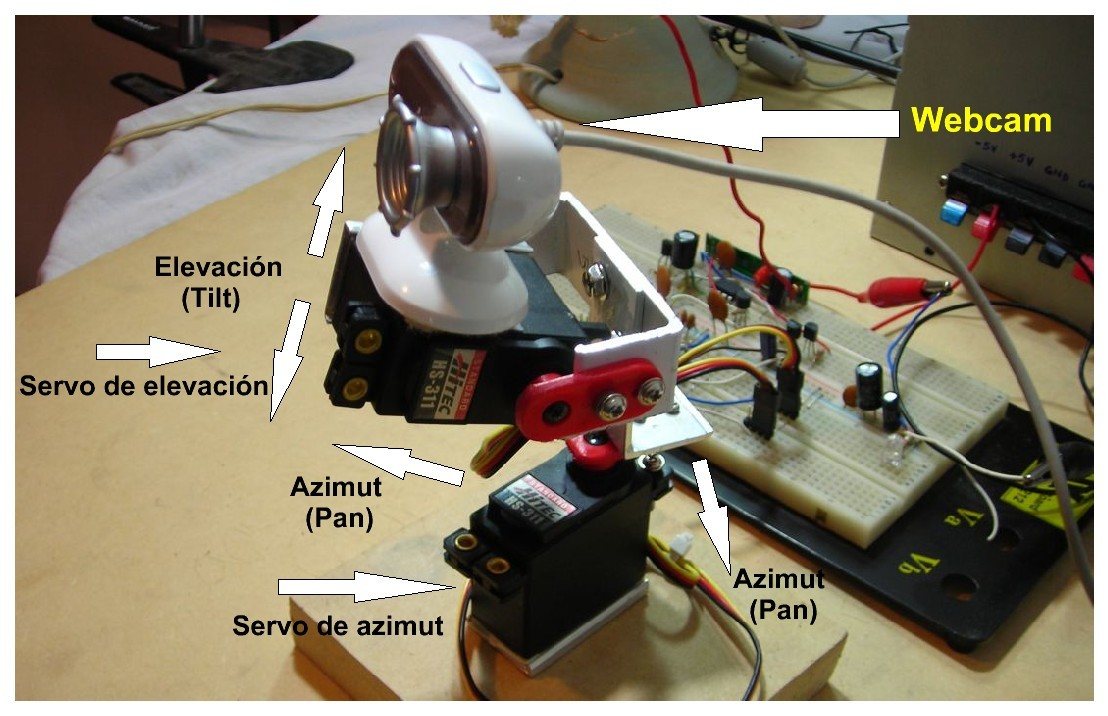
En la imagen puedes apreciar que el servo inferior (o de azimut) está fijo y asentado a una base y que moviliza un pequeño trozo de aluminio en forma de “L”. Este primer servo nos dará la movilidad en el eje cartesiano “x”, entregándonos un paneo de 180° a izquierda y derecha.
Luego continúa hacia arriba una sección en forma de “U” recta a la que se asegura el brazo de palanca del segundo servo, el cual, gracias a esta disposición, nos dará el movimiento sobre el eje cartesiano “y”, aportando al sistema el ajuste de altura, también conocido como elevación o tilt. El detalle a destacar en este desarrollo constructivo lo ofrece este segundo servo que, en lugar de movilizar su brazo de palanca para accionar los desplazamientos, es el propio cuerpo del servo el que se moviliza mientras el brazo actuador permanece fijamente atornillado a la estructura inferior.
Para comprender mejor la complejidad de movimiento que posee el sistema y el alcance que puede tener dentro de un sistema de cámaras de vigilancia o de simple observación, te recomendamos ver el siguiente video donde podrás comprender el sistema móvil empleado y, a su vez, podrás imaginar y desarrollar tus propios arreglos mecánicos:
Combinando de forma apropiada los movimientos de los actuadotes de los servos, seguramente podrás lograr un mejor sistema del que te mostramos o, tal vez, otros diseños más complejos como pueden ser brazos robóticos, articulaciones para hacer caminar un androide bípedo o algún hexápodo, que siempre son tan interesantes de desarrollar por el gran desafío que significa programar una rutina que logre coordinar el movimiento de patas, las que seguramente involucrarán a varios servos y ninguna de ellas se deberá tropezar con la otra para lograr que nuestro “insecto” camine, es decir, se traslade de un lugar a otro como si fuera un insecto real.

Programando servos con BASIC
En el desarrollo de este artículo utilizaremos un tema que ya hemos visto: el uso de los módulos de radio de UHF que nos permitirán utilizar el sistema de manera remota o a distancia. Sin duda alguna, esta posibilidad expande notablemente las aplicaciones potenciales que puede tener esta rama de la electrónica llamada también “mecatrónica”.
Manejar y operar sistemas electromecánicos a distancia como el que aquí veremos son el preludio de aplicaciones más complejas, como puede ser la manipulación de material radioactivo dentro de un reactor nuclear. Es decir, en todos aquellos lugares donde las manos del ser humano no puedan acceder, allí estarán los servomecanismos operados de manera inalámbrica. Obviamente, la complejidad de los mecanismos y la precisión en los movimientos serán muy superiores a las expuestas aquí, pero no te quepan dudas que los principios elementales son exactamente los que verás en este artículo.
Como siempre, en el encabezado del programa definiremos el dispositivo a utilizar y la frecuencia del reloj o “clock” del sistema. Para este ejemplo hemos seleccionado el 16F628A a una frecuencia de 20 Mhz, que son valores aptos para el programa compilador BASIC que utilizamos en la programación de los microcontroladores (Proton Lite). También en la parte inicial definiremos las variables que indicarán la posición que adopte cada servomotor que, para hacerlo bien comprensible, hemos seleccionado las palabras GIRO y ALTO.
Es decir, la variable GIRO determinará la posición del servo inferior que brinda el movimiento en el eje “x”, mientras que ALTO lo hará con el encargado del movimiento de elevación, movilizando la webcam por el eje de las ordenadas (eje “y”). Una vez comprendido esto, pasamos a definir los pines del microcontrolador que manejarán los servomotores, es decir, los pines que llevarán los impulsos de ancho variable a cada servomotor, los que de manera muy original hemos bautizado como AZIMUT y ALTURA, para facilitarte la comprensión.
Le indicamos al microcontrolador que trabajaremos en modo digital con la instrucción ALL_DIGITAL, con la que anulamos el funcionamiento de los comparadores del 16F628A. Esto es lo mismo que colocar CMCON = 7, sintaxis a la que muchos están más acostumbrados pero que significa lo mismo y causa el mismo efecto sobre el microcontrolador.
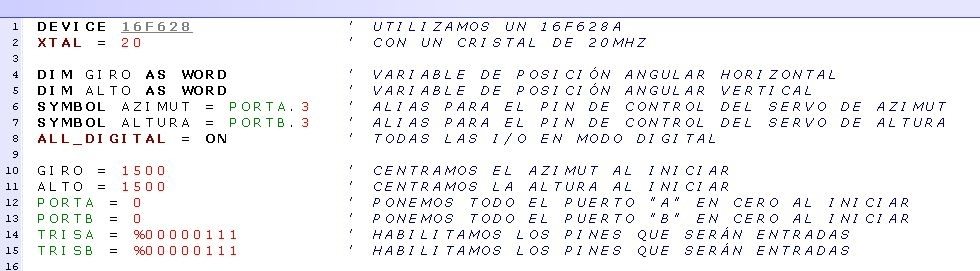
A partir de este punto definimos los valores iniciales de las variables y las condiciones de los pines de cada puerto del microcontrolador. Como dijimos anteriormente, un valor de 1500 equivale a un posicionamiento en el centro del recorrido del actuador del servomotor. De aquí surge que al conectar el sistema a la fuente de alimentación, ambos actuadores adoptan la posición central de su recorrido. Con las instrucciones TRIS definimos los pines que serán entradas y los que serán salidas. Podemos ver que en ambos puertos tenemos los tres primeros pines como entradas y el resto como salidas.
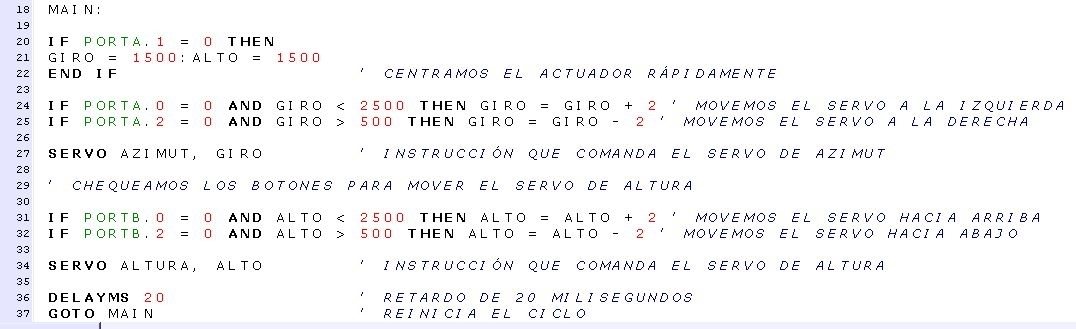
Luego viene el lazo principal (MAIN) del programa donde se desarrolla todo el recorrido y lectura de los pines de entrada. Vemos que el pin 1 del puerto A es el encargado de llevar al sistema a la posición inicial o de “RESET” que le decimos en los videos, colocando en las variables que definen el ancho del impulso un valor de 1500. Luego chequeamos los pines que activan los incrementos o decrementos de las variables y, si observas bien, notarás que ya no varían de a una unidad sino que lo hacen de a dos. GIRO = GIRO + 2 y GIRO = GIRO – 2. El valor que exista en las variables GIRO y ALTO se reflejará en movimiento por parte de los servomotores, adoptando la posición que elijamos.
Por supuesto que la mayoría de las mentes brillantes que visita NeoTeo ya estará ideando y pensando la forma de realizar la toma de datos correspondientes a las variables a partir de los mapas de bits de la misma imagen que nos devuelva la webcam, para comenzar a desarrollar una Sentry-Gun … ¡ya los imagino!
Optimizando las velocidades de acción del sistema, puedes transformar este simple sistema de orientación de cámara webcam en lo que desees. ¿Alguien dijo seguidor de cuerpos celestes para telescopio? ¿O me pareció escuchar que están preparando un sistema de dirección para aeromodelos? Cualquier aplicación es posible, sólo hay que soñar.
Acoplando el módulo UHF
De la misma forma que cuando ensayamos con sencillos LEDs para experimentar con módulos de radio UHF, ahora trabajaremos basándonos en el mismo estilo de programa para el 12F675, pero, en vez de encender LEDs, cada estado lógico alto que obtengamos en sus salidas ahora nos servirá para activar transistores NPN, según el siguiente circuito:
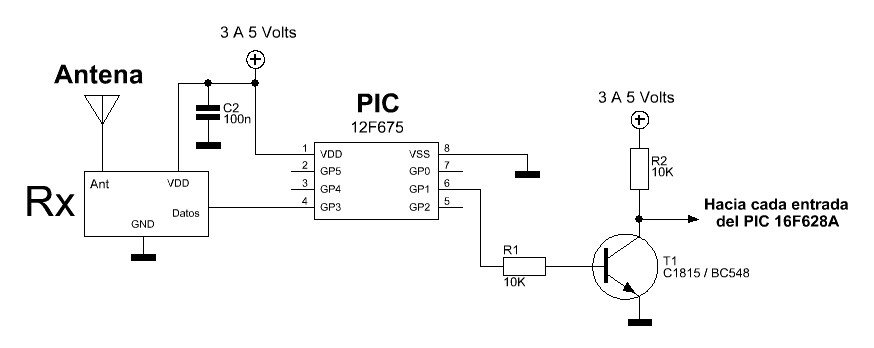
Entonces, cada estado alto a la salida de un pin del 12F675 provocará un estado bajo en el Colector del respectivo transistor, lo que equivaldrá a un pulsador activado respecto a GND para el 16F628A encargado de controlar los servos. Cuando a la salida del 12F675 existe un estado bajo, el transistor no conduce a su salida y entonces aparece un estado alto en su Colector. Todo esto como si se tratara de un pulsador ubicado en cada pin de entrada del 16F628A.
Naturalmente, en el gráfico hemos dibujado un solo transistor pero tú deberás colocar la cantidad equivalente a los pulsadores que quieras emular. El transmisor no varía respecto al artículo anterior por lo que no merece mención alguna. Por último, recuerda alimentar al módulo receptor y al 12F675 con los mismos 5 Volts que utilizas para el 16F628A. Recuerda también que los motores de los servomecanismos generan mucho ruido eléctrico que puede provocar funcionamientos inestables en el sistema. Trata de filtrar muy bien la alimentación en el receptor y en los PIC de esta sección con capacitores cerámicos de 100 nanofaradios (100 nF) ubicados lo más próximo posible a los microcontroladores. Un par de capacitores electrolíticos de 100uF repartidos en el circuito también serán bienvenidos.
¿Quieres verlo en acción con la webcam? Aquí lo tienes bien detallado.
Sería muy interesante y enriquecedor para nosotros saber qué aplicaciones se te ocurren a partir de un sistema de estas características. Deja volar tu imaginación y compártela con nosotros. Tal vez nos entusiasmemos y te ayudemos a desarrollarla. ¿Te gustaría?


Simplemente… bravísimo.
Ya puestos estaría bien continuar este con el control de los motores paso a paso… y un dia de estos voy al trabajo en un Gundam!!!
Gracias Sr Sacco!!
jajajajaj
Buen dia Mario:
Sabia que nos hibas a sorprender con otro de tus exclentes proyectos, este de la camara esta genial, ademas el principio de los servos esta bien explicado, aunque he visto que estos servos tambien se pueden modificar para que funcionen con giros completos aprovechando el torque que tienen.
Bueno y pues propuestas de proyectos hay muchisimas de primera mano se me ocurre un robot que envie el video inalambricamente al PC o utilizando proyectos antes vistos, como por ejemplo el de los 7 leds en fila que se hacen girar y generan una imagen que se desea, creo que con estos servos se puede hacer algo similar haciendolos girar de 0 a 180 grados repetitivamente, y generar una imagen.
O por ejemplo con las mismas señales de los servos, se podrian controlar leds RGB, o por ejemplo ojala nos enseñaras a controlar estas pantallas LCD pequeñas que venden, o porque no el mismo proyecto mostrado pero controlado via internet.
En fin, la imaginacion empieza a volar, y pues eso es lo que necesitamos los jovenes, estar en estos proyectos tan interesantes que nos alejan de las drogas y de los malos vicios.
Gracias por estos proyectos Mario, me gustan mucho y me estoy volviendo fanatico ha tu seccion.
LOS SERVOMOTORES YA ESTAN PASADOS DE MODA ADEMAS DE QUE SON MUY CAROS; HAY QUE IDEAR NUEVOS MECANISMOS QUE SON MUY EFICIENTES COMO LA HIDRAULICA Y LA NEUMATICA QUE ES MAS PRECISA. Y SE PUEDE HACER CON MATERIALES DE RECICLAJE
YYYYYYYYYYYYYYYYYYY?????????????
Jajajaja, creo que estas un poco mal amigo, no creo que esten pasados de moda, los servomotores son mucho mas precisos para todo tipo de aplicaciones, como la robotica o como la propuesta que nos presenta Mario. Y ni hablar de precios, el costo entre servomotores y pistones hidraulicos o neumaticos es abismal, son muchisimas veces mas baratos los servomotores.
Muchas gracias, la verdad es que me has acercado al mundo de la robotica *-*
la verdad es que esta muy interesante, pensare que locuras se me ocurren
saludos!!!^^
QUE BIEN…perdon, pues que magnifico trabajo de don mario y la verdad me servirá pues estoy aprendiendo electrónica y los servomotores son la el ABC en este tipo de técnicas y como dijo darypark de que están pasado de moda, quisas tenga razón pero primero tenemos que aprender a caminar antes de volar.
Lo felicito por este trabajo y en lo personal me será muy util pues ya estoy arto de que el cable grueso de mi webcam la mueva.
hola queria saber quien tiene mas fuerza para levantar algo?? un motor paso a paso o un servo de los buenos???
miren este movimiento de servomotores http://www.youtube.com/watch?v=tsUG2oHl79c
Simplemente supremo!!!
buena informacion
Estoy de acuerdo con darypark, debería desarrollarse algo mejor y más práctico que el servomotor. Lo digo por el movimiento tosco que hace, igual y en el ensamblado de un automovil es lo de menos, pero para un robot tipo humanoide que debe tener movimientos suaves no es muy práctico… aunque de aqui a que existan "Terminator" o exoesqueletos para proteger a los viajeros espaciales, pues…
pero con una buena programación de la señal que se le envia al servo se pueden lograr movimientos más fluidos, mira mi vídeo donde programo una señal para servomotor : http://www.youtube.com/watch?v=tsUG2oHl79c
Hola Mario. He podido observar que utilizas en este proyecto lo que parece una fuente
de alimentación de PC convenientemente modificada para alimentar los circuitos. Me
pregunto si seria posible que explicaras en un futuro proyecto las modificaciones que
se tienen que hacer a una fuente de PC para utilizarla en nuestros montajes. Podríamos
de esta manera dar utilidad a alguna vieja fuente que muchos tenemos medio olvidada
por casa. Gracias.
Agendado kirishima !
Le podríamos agregar un LCD (opcional) para poder ver los consumos de cada rama. (5V, 12V, etc ….) y un ajuste fino de tensión de salida.
Suena interesante.
Gracias !
Es un proyecto interesante yo hice uno similar, con tres motores paso a paso uno de barrido horizontal, verticar y zoon, y era controlado desde el PC con una comunicacion RS 232
Hola andre necesito ayuda sobre la construccion de un circuito para mover 2 motores por pasos independientemente. Es que estoy desarrollando un proyecto para mover un carro de acuerdo a lo que el reconozca por madio de una camara pero los conocimientos de electronica mio son bastante limitados jajajaja
hola andres soy tecnico electronico quisiera entender un poco de programacion sencilla de un motor algo muy simple gracias cualquier cosa mi correo rubencion_at@yahoo.com.ar
esta es la parte que quiero comensar a hacer, ya que soy nuevo en la electronica.
gracias por esta imfprmacion
me parece bueno este post, ya que me sirve como instruccion inicial de aprendizaje, ojala y nos expliquen tambien los motores paso a paso… igual gracias y que Dios te bendiga
podrias poner el circuito electrico q utilizaste para este proyecto? ya q estoy atorado un alguna parte
Tu siempre nos sorpredes!!!!!
en mi escuela unos compañeros y yo estamos por realizar un brazo robot
para fines educativos y pues estamos pensando utilizar servos
este articulo nos sera de mucha utilidad
gracias.
si nos quisieras reconmendar algo es bienvenido
Hola Mario, lindo proyecto, ahora te hago una pregunta, por que razon usas un 675 para recibir señal para luego ir al 628, no seria mas facil (o mas barato)recibir directamente al 628? Gracias por tu respuesta. Gran saludo.
Muy buen tutorial
Yo Estoy haciendo un brazo robot delta, y quiero saber como controlarlo, ya que lleva tres servos, no se si me pueda ayudar, se lo agradeceria mucho
CREO QUE EL APORTE ES MUY IMPORTANTE, PUES SE COMIENZA COMO UN JUEGO, PERO CON ESTOS SERVOMOTORES PODEMOS HACER MAQUINARIA PARA TODA LA INDRUSTRIA MINERA, METALMECANICA , AGRICOLA SONDEO ETC. Y PORQUE NO DECIRLO HACER ELEMENTOS Y PIEZAS MECANICAS A DISTANCIAS DE MILLONES DE KILOMETROS CUNDO YA PASEMOS A LA ERA ESPACIAL Y SE COLOQUEN ESTACIONES EN OTROS PLANETAS, Y LO MAS HERMOSO QUE SE PODRAN EJECUTAR DE TIERRA ESTAS MECANIZACIONES . MUCHAS GRACIAS A UDES . OSMAEL URBINA GUSTIMANN – CHILE – QUINTA REGION – COMUNA EL QUISCO
Llevo tiempo observando este blog, que me parecé magnifico sus temas.
De hecho tengo desde hace como 6 meses con la espinita (la idea dando vuelta en mi cabeza) de hacer un submarino a escala con servomotores, microcontroladores y manejadon radiofrecuencia. Tienes alguna idea que podría ayudar a simplificar el tema de la comunicación vía RF
tas ekivokado tio kon los servo ekonomizas maas.
al kontrario de la hidraulika sus komponentes k son para armar un circuito simple es muy karo
tas ekivokado tio kon los servo ekonomizas maas.
al kontrario de la hidraulika sus komponentes k son para armar un circuito simple es muy karo
Hola, es que estoy construyendo un brazo robotico, encontré unos servos por Internet y en la imagen el tercer cable estaba en blanco y el fondo era del mismo color y no lo vi, cuando abrí la caja de los servos me di cuenta del erro, leí lo de control de posicionamiento del actuador mecánico, tengo uno idea de para que sirve pero no estoy seguro, te lo agradecería mucho si me los pudiese explicar con mas precisión. Muchísimas gracias por adelantado, pues me ayudo mucho el texto.
Otra pregunta mas, si conecto tan solo el rojo y el marrón, ¿el servo se enciende o no? Es que yo no quiero conectarlo a ningún chip ni nada por el estilo tan solo a un conmutador de dos posiciones.
Muchísimas gracias.
las imagenes que capta la cámara tambien se trasmiten inalámbricamente o simplemente con el cable usb??
hola amigos alguien podría ayudarme con esto: necesito saber que tipo de motor eléctrico necesito comprar para mover una estructura de 350 kilos aprox en su propio eje, que me permita girar en ambos sentidos controlando la velocidad y el angulo de desplazamiento. les encargo mucho su ayuda
hola la verdad esta interesante tu articulo…. ps me gustaría poder implementarlo tambien… ya que tengo un proyecto hacerca de un control de posición usando servos…… no se si podrías proporcionarme la información de todo lo que hiciste.. por favor.. sería de gran ayuda… mas con ese ckto de RF que usas que tambien serviria par el curso de CIRACO(circuitos de radiocomunicacion)… espero una respuesta.. y gracias de antemano….mi correo es:teopisco@hotmail.com.. la verdad es qyue me ayudarias un monton….
hola .. la verdad es que esta muy interesante tu artículo…. ps no se si me podrias proporcionar ingormacion hacerca de todo lo que hiciste, me sería de mucha ayuda si lo hicieras, ya que tengo un proyecto hacerca de un control de posicion con servos….te agradeceria un monton… ademas es interesante el ckto de RF que usas… la verdades que en esto recien estoy empezando… por favor… mi correo es teopisco@hotmail.com… agradezco de antemano tu ayuda .. y muchas gracias
hola .. la verdad es que esta muy interesante tu artículo…. ps no se si me podrias proporcionar ingormacion hacerca de todo lo que hiciste, me sería de mucha ayuda si lo hicieras, ya que tengo un proyecto hacerca de un control de posicion con servos….te agradeceria un monton… ademas es interesante el ckto de RF que usas… la verdades que en esto recien estoy empezando… por favor… mi correo es teopisco@hotmail.com… agradezco de antemano tu ayuda .. y muchas gracias
Yo hice un carrito seguidor de linea utilizando un servo identico al tuyo, un motor de CD (controlado con PWM), sensores CNY 70 y el cerebro de todo, era un arduino, todo lo que mencionas lo aplique antes de haber visto este post y te puedo decir que tienes toda la razon =)
Felicidades está explicado excelente
tengo una duda como hago mi circuito
para qe el servo se pueda mover de los lados
ozea qee gire a un lado luego qee gire hacia el otro lado contrario
necesito ayuda porfa
gracias
tengo una duda con los servos
como hago un circuito para qe el motor
me gire en ambas direciones
por ejemplos a la derecha luego con un cambio
me gire a la izquierda
?
tengo una duda con los servos
como hago un circuito para qe el motor
me gire en ambas direciones
por ejemplos a la derecha luego con un cambio
me gire a la izquierda
?
MUY BUENO EL CONTENIDO REALMENTE NOS ACERCA AUN MAS AL MUNDO DE LA ROBOTICA. EL SABER K NO ES TAN DIFICIL COMO PARECE. ME HIZO VOLAR ABRIR MI MENTE, SOY TEC. ELECTRICO. BUEN CONTENIDO .
hola muy bueno tu informe, pero me gustaria si alguien pudiera decirme donde podria conseguir servos en argentina ya que por mas que busco no encuentro. Busco servos pequeños, son para un proyecto de robot bípedo, necesito 4 para comenzar con la parate de locomocion. En realidad necesito 10 servos pero para comenzar solo 4 o 2 en su defecto, desde ya muchisimas gracias.
PD:Favor de enviarme cualquier informacion que me ayude a mi e-mail. darkfenix@hotmail.com.ar
Atte. DarkFenix
muy bueno amigo te felicito por tu video pero bueno yo conozco el tema d e microcontroladores bueno no me da tanta impresion los amigos que comentan que ya paso de moda los servos estan muy equivocados ellos diran por que nunca en su vida habran tocado el tema de pic pero quisas seran de otra especialidad o desconocen la electronica bueno solo le digo que s e informen bien sobre el tema salu2,,,,,
Esta muy bien explicado, pero no se menciona ¿cómo aumentar la velocidad a la que se muueve un servo?
me imagino un avionsito a elice que despues de volar desvie los motores hacia abajo y pueda aterrizar verticalmente =O
o con varios serbos armar una vivorita que se pueda arrastrar un meterse en lugar pequeños
o emular el vuelo de un ave o los brazos y piernas de una personas para hacer instrumentos que ayuden a gente discapacitada
hay demaciadas cosas que podes hacer
Tengo el motor HC-AQ0335D que es un motor a pasos,tengo el MR-J2-03A5
como puedo controlarlo con un PLC keyence
La verdad no he trabajado mucho con los servomotores
Pero ese tema me gusta mucho,, y veo que con
Loa servomotores podemos montar una gran
Cantidad de sistemas controlados.. Y adentrarnos en algo que me apasiona
Y es el diseño de robots.
muy buena informacion como puedo ver mas videos donde se apliquen los servomotores en la robotica
que padre, no podrian mandarme el circuito y o alguna introduccion de lo que hace en si , me gustaria hacer uno parecido 😀
tremendo! me dieron ganas de hacer algo utilizando servomotes xD
ahora, lo que se me ocurrió es utilizar un servomotor para hacer en tipo una ventana de techo, hacer una "cortina" motorizada (horizontal) – vagamente me hago una idea de como hacerlo mecánicamente, pero no el como programar el servomotor, sería sencillo no? y mejor aún si se puede "auto-accionar" (por ej: llegó tal hora = abrir ← | llegó tal hora = cerrar → ) je
donde podría conseguir info como para hacer eso? me re entusiasmé con este post jaja
gracias de antemano
mandenme tutoriales a mi mail(davidleos2010@hotmail.com) me interesa muxxo esto,se los agradeseria mucho,gracias.
Los servomotores estan presentes en todos lados , los que muestra aca son servomotores simples , pero tambien existen servos industriales los cuales son usados para sitemas de control de produccion en serie,tales como los brazos roboticos encargados de la seleccion de productos, claro que estos sistemas son complejos y van acompañados de sistemas hidraulicos y neumaticos.
Los post realmente interesantes en NeoTeo, siempre tienen tu nombre..
Un saludo !