


¿Te cuesta encontrar contrincante para tus partidas? ¿Tus amigos no quieren jugar contigo? A no preocuparte, por que los muchachos de Georgia Tech han resuelto tu problema: crearon el primer fubolito robótico.
Seguramente las conoces. Son esas canchas de fútbol de mesa, que se conocen en España como “futbol tabla” o “fubolito”, y que en otros países reciben nombres como “taca-taca”, “metegol”,”futbolín” o “foosball”. Se trata de un pasatiempo (aunque en muchos lugares califica como deporte) sumamente entretenido, pero que requiere por lo menos de dos personas para poder jugar.
O se necesitaban, porque Michael Aeberhard, Shane Connelly, Evan Tarr y Nardis Walker, todos del Georgia Tech, han invertido 500 dólares para crear el primer fubolito robótico. Los muchachos, quizás cansados de no encontrar un rival disponible, o talvez simplemente con ganas de hacer algo diferente, se pusieron a pensar como podían hacer una mesa de fubolito que pudiese jugar contra un humano. Y lo lograron.
Utilizando como “cerebro” un viejo ordenador dotado de un microprocesador Pentium III corriendo a 800 MHz, una webcam, algunos microcontroladores, un puñado de servomotores de aeromodelismo y una gran dosis de ingenio, dieron vida al único futbolín robótico que hemos podido encontrar en la red.
El funcionamiento de esta mesa es más o menos el siguiente: una cámara Web recoge la imagen del campo de juego en tiempo real. La pelota, de color naranja, resulta fácil de detectar por el programa (realizado en Java) que corre en el ordenador. En base a las posiciones de la pelota y de los jugadores del equipo manejado por el humano, el ordenador decide como mover a los integrantes de su propio equipo.
La información resultante se transforma en una serie de comandos que se envían a una placa controladora desarrollada por estos cuatro inventores. En ella, un puñado de pequeños microcontroladores PIC12625 de 8 pines se encargan, bajo la supervisión de un potente PIC18F4520, de manejar cada uno de los servomotores encargados de mover a los jugadores.
Cada una de las barras que mueven a los jugadores del equipo controlado por el ordenador ha sido dotado de dos servomotores HS-81s, del mismo tipo de los usados en modelismo. Uno de ellos se encarga del movimiento lateral de la barra que sostiene a los jugadores, y el otro de hacerla girar para lograr “patear” el balón.
No son pocos los obstáculos que han tenido que superar estos cuatro amigos, pero el resultado vale la pena. No todo el mundo puede darse el lujo de tener en casa su propio fubolito robótico. Si te animas, en su pagina web esta todo lo necesario para que armes el tuyo.
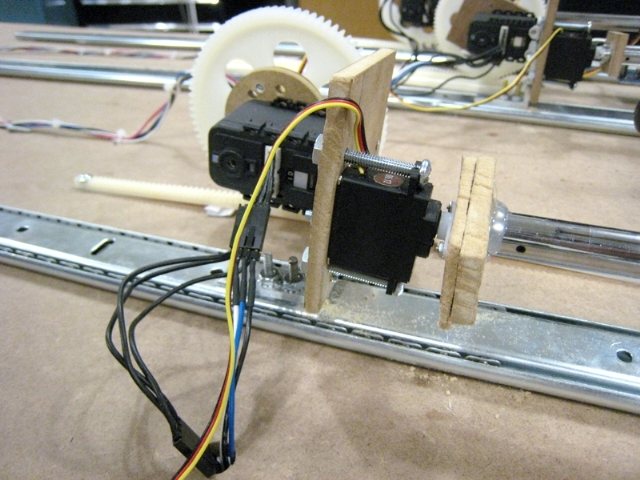
- "Musculos" de servomotores HS-81, los usados en modelismo.

- Esta es la placa que maneja los servos.
