

Las memorias EEPROM que funcionan bajo el protocolo I2C han ganando poco a poco un espacio en el hardware de los equipos electrónicos hasta transformarse en uno de los medios de almacenamiento de información más populares por su practicidad y sencillez de manejo. Tener la posibilidad de almacenar datos de diversa índole en una memoria no volátil, es una característica importante de los equipos que les permite la desconexión prolongada de cualquier suministro energético y conservar durante mucho tiempo información valiosa que de otro modo, se perdería al desconectar un sistema. También conocidas como memorias de protocolo “serie” las 24CXX son infaltables en cualquier equipo electrónico de consumo masivo y aquí te ayudaremos a comprender su funcionamiento.
Estos diminutos circuitos integrados poseen la capacidad de almacenar datos organizados, los que deben ser grabados de manera apropiada en su interior y además tienen particularidades que los hacen sobresalir y destacar dentro de su género. Algunas de las características dignas de mencionar, pueden ser las que a continuación enumeramos:
- Pueden ser escritas y borradas de forma eléctrica = Electrically Erasable Programable Read Only Memory
- Están garantizadas para 1 millón de ciclos de escritura/lectura.
- Pueden llegar a retener la información sin ser alimentadas durante cientos de años.
- Se organizan por páginas para facilitar su direccionamiento y almacenamiento de la información.
- Utilizan para su funcionamiento una tensión única (5Volts o 3,3Volts)
- Son compatibles con el protocolo serial I2C (Marca registrada de Philips)
- Bajísimo costo.
- Amplia variedad de encapsulados para adaptar el modelo necesario, de acuerdo al tamaño de la aplicación.

Repasemos el Concepto I2C
El Bus I2C (Inter – Integrated Circuit) es un sistema de comunicación de dos cables, con propiedades de velocidad de transferencia de datos considerada de media a baja (400 Khz. a 100 Khz.) y que fue desarrollado por Philips Semiconductor, a comienzos de la década del 80. Originalmente creado para reducir los costos de los equipos electrónicos, tuvo sus primeras aplicaciones en controles de contraste, brillo y volumen en aparatos de televisión pero actualmente encontramos conexiones por bus I2C en una gran variedad de computadoras, equipos industriales, entretenimiento, medicina, sistemas militares y un ilimitado abanico de aplicaciones e importantes usos potenciales.
Antes de la aparición del Bus I2C, las transferencias de datos de memorias a microprocesadores, eran realizadas en forma paralela requiriendo de esta forma encapsulados con una importante cantidades de pines (24, 28, o más pines). La asignación de funciones de los pines se repartían entre el direccionamiento de la memoria, la selección, el control y la transferencia de datos. Esta última solamente requería de 8 pines más otros ocho pines para el direccionamiento, por mencionar algunos. En contraste con este despilfarro de pines, el Bus I2C permite la comunicación “chip-to-chip” usando solo dos cables en una conexión serial, permitiendo de esta forma comunicar dispositivos con muy pocas vías.
Estos dos cables son llamados Clock (SCL) y Data (SDA) y son los encargados del direccionamiento, selección, control y transferencia de datos, de a un BIT por vez.
SDA está encargado del intercambio de datos, mientras que SCL se encarga de sincronizar al transmisor y al receptor durante la transferencia de los datos mencionados desde un IC al otro. Dentro del sistema de comunicación I2C, los dispositivos están identificados como Maestro (Master) y Esclavo (Slave), por lo que al dispositivo que inicia el contacto y “abre” el bus se lo denomina Master, mientras que al que recepciona y contesta el llamado se lo denomina Slave. Los dispositivos conectados al bus pueden ser Master solamente, Slave solamente o intercalar las funciones de Master y Slave de acuerdo como el sistema requiera, tal como es el caso que veremos de las memorias EEPROM I2C.
Este sistema puede interconectar a muchos IC sobre el bus (hasta 255 dispositivos) y todos conectados a los mismos dos cables SDA y SCL. Cada dispositivo esclavo posee una única dirección y cuando el Master transmita el llamado todos los ICs conectados al bus lo escucharán, pero solo le contestará aquel que posea la dirección que el transmisor incluyó en su llamada y será con este único Slave, con quien iniciará la transferencia de datos hasta que decida “cerrarla”.
Comenzando a comunicar
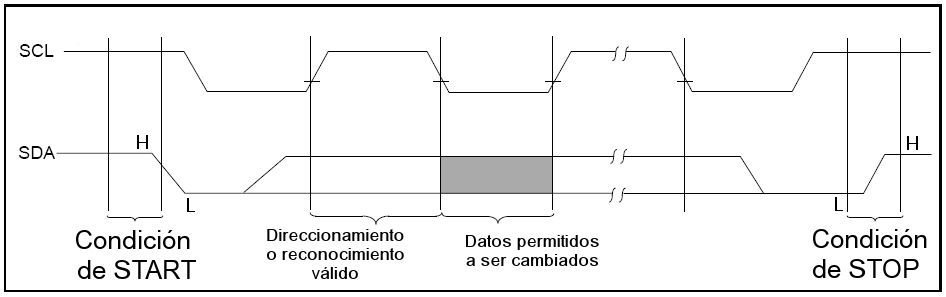
La condición de START o Inicio ocurre únicamente en la transición de un estado ALTO a un estado BAJO en la línea SDA mientras la línea SCL se encuentre en un nivel ALTO. En cambio, la transición de un estado BAJO a un estado ALTO en la línea SDA, mientras la línea SCL se encuentre en un nivel ALTO, indicará una condición de STOP o Parada. Las condiciones de START y STOP son siempre generadas por el dispositivo que asuma la condición de Master dentro del bus.
El bus se considerará ocupado después de una situación de START y pasará a estar nuevamente libre cierto tiempo después de la transmisión de la condición de STOP. Este “cierto tiempo” será determinado por el Master y vendrá especificado en la hoja de datos del mismo.
En Proton debemos indicarle al programa y/o al microcontrolador cuáles son los pines que cumplirán las funciones de SDA y SCL, porque pueden existir desarrollos en que estemos trabajando con un dispositivo que no posea un módulo SSP nativo (Synchronous Serial Port). En este caso, no tendremos pines dedicados (por hardware) a tal fin en el microcontrolador y debemos indicarle al sistema mediante instrucciones de programa, que pines cumplirán la función de interconexión al Bus I2C. Esto se realiza al comienzo del programa antes de la declaración de variables y se formaliza mediante un comando llamado DECLARE, quedándonos la secuencia de la siguiente forma:
DECLARE SDA_PIN PORTB.0
DECLARE SCL_PIN PORTB.1
En el ejemplo propuesto, hemos ordenado que SDA sea el pin 0 del puerto B, mientras que SCL sea el pin 1 del mismo puerto. Esta aplicación es válida para cualquier puerto del microcontrolador mientras esté configurado en modo digital y se debe tener en cuenta que si no se incluyen estas directivas al inicio del programa, por defecto se asignarán los pines PORTA.0 para SDA y PORTA.1 para SCL.
Otra de las cosas que debemos indicarle a nuestro sistema durante el desarrollo es la velocidad a la que intercambiará datos el bus ya que la mayoría de los dispositivos actuales puede realizarlo a 400Khz o a 100Khz. Si bien ya existen circuitos integrados capaces de trabajar a 1Mhz también nos encontramos en la actualidad con el contraste de memorias EEPROM que no pueden intercambiar datos a más de 100Khz. Por lo tanto, si optamos por utilizar la frecuencia mínima, incluiremos el siguiente comando: DECLARE SLOW_BUS=ON
Luego de esto, ya estamos listos para “abrir” el diálogo dentro del bus y lo haremos con el sencillo comando: BSTART
De esta forma, el bus ya habrá sido abierto por nuestro microcontrolador asignándose éste la función de Master y pasando a estar todo listo para la transferencia de datos hacia el Slave que el microcontrolador decida, transmitiendo al bus la dirección pertinente. Para leer datos, en nuestro caso alojados en una memoria, lo haremos de la siguiente forma: BUSIN Control, Dirección, [Variable]
La sintaxis expresada nos indica que el Master (nuestro microcontrolador) recibirá (BUSIN) un dato, el que colocará dentro de una Variable luego de haberlo sacado de uno de los dispositivos “colgados” del Bus I2C. El circuito a quién desea extraer el dato le transmite a través de la palabra de Control que va a extraer datos de él, y que dicho dato se encuentra en la Dirección apuntada. La palabra Control posee dos informaciones importantes a destacar que son el nombre que posee nuestro dispositivo remoto dentro del Bus y la instrucción acerca de que vamos a leer en él. Si por el contrario lo que desea hacer el sistema es escribir un dato en el dispositivo Slave seleccionado, lo hará mediante la siguiente forma: BUSOUT Control, Dirección, [Variable]
Con una sintaxis muy similar al caso anterior, el Master transmitirá (BUSOUT) un dato, el que tomará de una Variable, y lo grabará en uno de los dispositivos conectados al bus y seleccionado con la palabra de Control. En esta palabra se indicará a cuál de todos los dispositivos le hablará, indicándole que grabará en él y que a este proceso lo hará en una Dirección definida dentro del programa principal. Cabe agregar en este punto que Proton y la mayoría de los fabricantes de memorias recomiendan efectuar una rutina de demora o espera luego de haber grabado un dato a través de BUSOUT, para asegurar la grabación del dato, la que se efectiviza mediante la expresión: DELAYMS 10 , indicándonos con esto que efectuará un retardo o demora (Delay) de 10 milisegundos. Luego, sólo nos queda “cerrar” el bus y lo haremos con la instrucción: BUSTOP
Eso es todo. Ya tenemos la forma de abrir el bus, de leer o de grabar en un dispositivo Slave y de cerrar nuevamente el bus. Es momento de saber cómo manejar la palabra de Control y la Dirección de lectura/escritura.
Organización Interna de las Memorias
No todas las memorias EEPROM I2C se direccionan y controlan de la misma forma. Por lo tanto, haremos un breve resumen de los datos más relevantes a tener en cuenta al momento de emplear la palabra Control dentro de los comandos BUSIN y BUSOUT.
Palabra o Byte de Control
La palabra o Byte de Control, nos indicará la dirección que posee la memoria dentro del bus y si vamos a leer o a escribir en ella.
24C00 = 1|0|1|0|X|X|X|R/W
R/W significa Read o Write, que en español equivale a Leer o Escribir respectivamente según lo que decidamos hacer con la memoria. Si vamos a leer la memoria (Read) este bit adoptará el valor 1. En cambio, al grabar un dato en la misma (Write), el valor será 0. Por su parte X, significa que el valor que adopte en estas posiciones no tiene relevancia, por lo que podemos adoptar para este lugar, un cero o un uno que el resultado será el mismo. Como dato adicional podemos mencionar que la memoria 24C00 posee una capacidad de 128 bits, organizada en una sola página con 16 Bytes de 8 bits
24C01/24C02/24C04 = 1|0|1|0|A2|A1|A0|R/W
Para este grupo de memorias tenemos la misma dirección en los cuatro bits iniciales (1010) que en el caso anterior, lo mismo para el bit final de R/W, pero encontramos un significativo cambio en las posiciones A0, A1 y A2 que coinciden con los pines uno, dos y tres respectivamente, según las hojas de datos de las memorias.
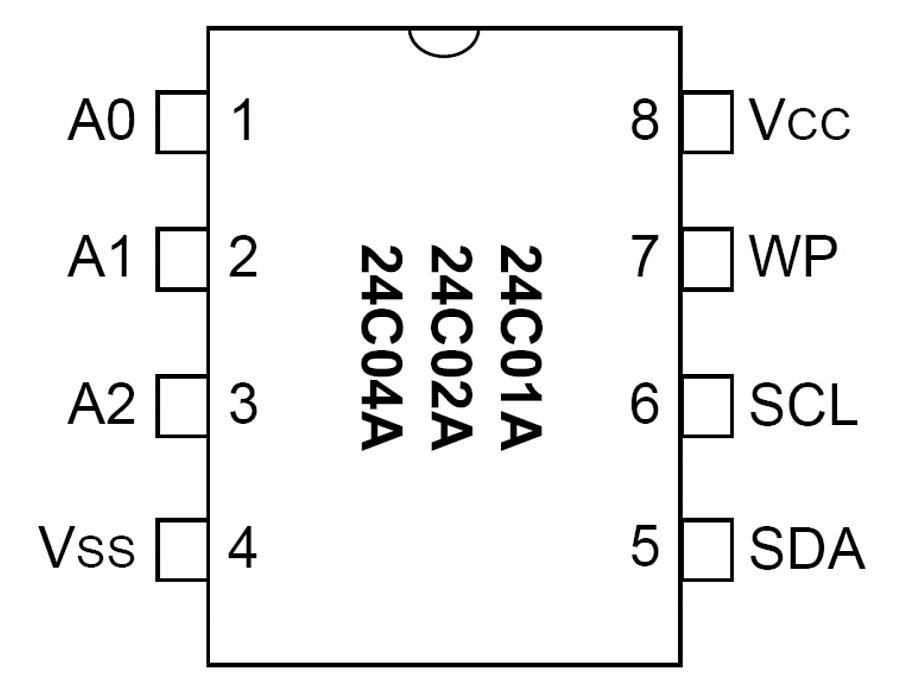
Con estos tres bits, podemos direccionar hasta ocho memorias conectadas al mismo bus, trabajo que puede realizar cómodamente el microcontrolador. La única que se diferencia de este grupo es la 24C04 que debe tener siempre conectado A0 a GND o a VCC, pudiendo por lo tanto, direccionarse sólo cuatro unidades de la misma a través de A1 y A2. A0, en este caso, servirá para direccionar el “puntero” de escritura o lectura, hacia la primer página de 256 Bytes o hacia la segunda.
Aquí empezaremos a ver ya, cómo la estructura interna de estas memorias está organizada en “páginas”. Por último, destacamos que en este grupo de memorias encontramos la siguiente característica: sumarse a otras iguales para incrementar la capacidad de almacenamiento.
Por su parte la memoria 24C02 posee una página de 256 Bytes y la 24C04 ya posee dos páginas de 256 Bytes cada una, sumando así 512 Bytes de capacidad. Vemos entonces, que las 24C01 y 24C02 poseen una sola página, por lo que la palabra de control para ellas será igual a 1010000X, siendo X el bit que defina la lectura o escritura en la memoria, mientras que la 24C04 tendrá dos palabras de control, según la página donde decidamos trabajar. Esto es, 1010000X para la primer página y 1010001X para la segunda.
24C08/24C16 = 1|01|0|B2|B1|B0|R/W
En el caso de estos modelos, repetimos los primeros cuatro bits iniciales que identifican a las memorias EEPROM seriales (1010) y el último bit R/W, mientras que nos encontramos con la terminología B2, B1 y B0 dentro de la palabra de control en estos modelos.
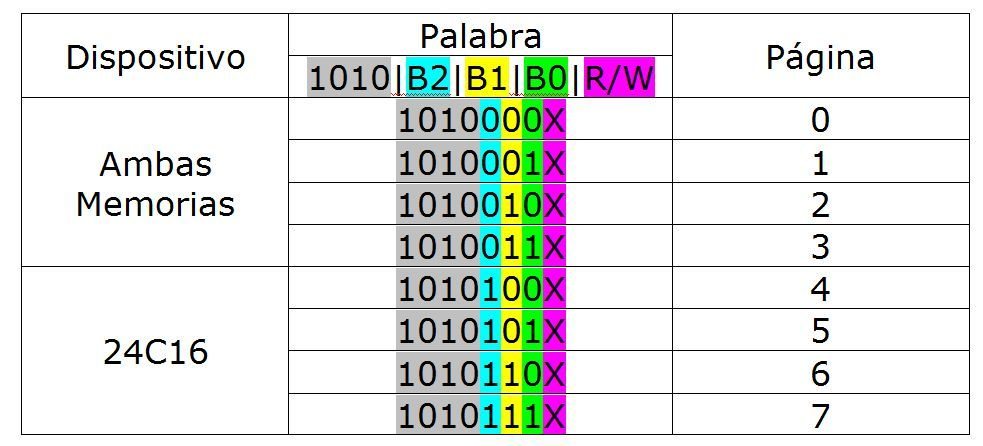
En el caso de estas dos memorias, no podremos colocar en el bus múltiple cantidad de ellas sino que sólo tendremos posibilidad de colocar una sola, a diferencia de las anteriores vistas hasta aquí. Esto es debido a que a pesar de poseer la misma disposición de pines que los modelos anteriores, A2, A1 y A0 no poseen conexión interna colocándose generalmente estos a GND.
Por su parte, B2, B1 y B0 sirven para identificar por software la página (o bloque) dentro de la memoria. Es decir, que para la 24C08 que posee una disposición de cuatro páginas de 256 Bytes (4 X 256 X 8 bits = 1 KByte = 8 Kbit); mientras que la 24C16, dispondrá de 8 páginas de 256 Bytes de 8 bits lo que equivale a un total de 2KByte que es lo mismo que 16Kbit. Por lo tanto, razonando lo mencionado y analizando el cuadro superior, vemos que tendremos 4 palabras de control para la 24C08 y 8 Palabras de control para la 24C16: una por cada página de 256 Bytes.
La palabra Dirección
Habiendo llegado hasta aquí, nos queda resolver solamente la forma en que estará compuesta esta palabra, la que será usada para decidir el casillero que ocuparemos con información dentro de la página que habremos seleccionado con anterioridad. En el caso de la 24C00 teníamos una página de tan sólo 16 Bytes, por lo que tendremos apenas 16 “filas” para ubicar Bytes de información. Protón Lite acepta cualquiera de las tres notaciones para las palabras de Control y de Dirección, es decir: Binaria, Decimal o Hexadecimal, por lo que podemos escribir para facilitar el trabajo, un comando de la siguiente forma:
BUSIN 161, 8, [Dato]
En el ejemplo mostrado tenemos la palabra de control 161, lo que equivale a 10100001 en binario y que nos indica que accederemos a la primer página (página cero) de cualquier memoria de las vistas y que la citada memoria será leída.
Luego viene el valor 8, que sería 00000100 en binario, lo que nos indica que se leerá la octava de todas las filas de Bytes que tenga esta página. Mientras que por último, el dato extraído será volcado en una variable de tamaño BYTE a la que hemos denominado “Dato”
Escribir en esta misma dirección sería:
BUSOUT 160, 8, [Otro_Dato]
El último bit de la palabra de control a pasado a ser cero (antes teníamos 161 y ahora tenemos 160), y el valor a grabar será el que exista en ese momento dentro de la variable “Otro_Dato”, también de tamaño BYTE y declarada al inicio del listado del programa.
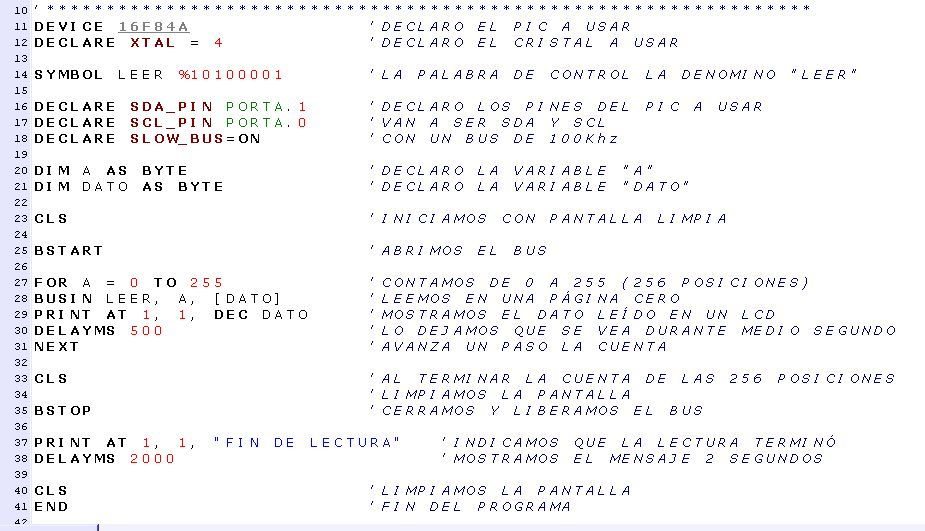
Con este sencillo programa de ejemplo podemos leer la primer página de una memoria EEPROM I2C y colocar en un display LCD cada uno de los valores leídos durante medio segundo antes de pasar al próximo valor, hasta leerlos a todos. Para otras páginas, variaremos la palabra de control según nuestras necesidades de uso. El ejemplo muestra la utilización de un PIC16F84A y la declaración de los pines que se utilizarán como SDA y SCL. También cabe destacar que se utilizará una baja velocidad de bus y que el LCD se conecta al puerto por defecto para tal fin, que en este caso es el B.
De esta forma se pueden guardar una multitud de datos en una memoria EEPROM I2C y tenerlos siempre listos para su utilización durante el desarrollo del programa. Además, funciones extras dentro del programa del microcontrolador nos pueden permitir detectar el corte de la tensión de alimentación y, mediante el uso de una batería de respaldo o Back-Up, grabar inmediatamente todas las variables dentro de la memoria para luego proceder a apagar el sistema de forma automática hasta que se reponga la energía. Un ejemplo de esta aplicación son los contadores de fichas de los videojuegos de salón, los flippers y la mayoría de las máquinas recreativas que trabajan con fichas o monedas. Mientras la máquina funciona normalmente, la batería de respaldo se mantiene cargada y al momento de un apagón o de la desconexión para su traslado, la información se guarda de manera automática para su posterior control. ¿Lo sabías?
