
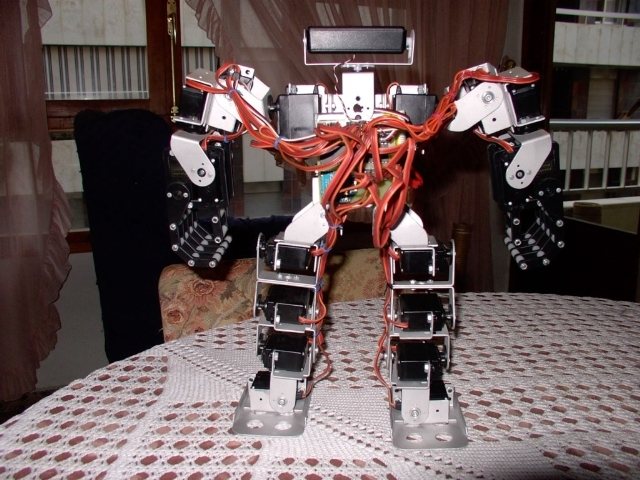
Estamos acostumbrados a ver robots diseñados y fabricados en Japón o Estados Unidos, por grandes empresas especializadas. Pero hoy les vamos a mostrar la creación de Julio Montagut, un español de 36 años que construyó a Robby, un robot bípedo.
Julio accedió gentilmente a nuestro requerimiento de información, contestando una serie de preguntas. La entrevista es de lo más jugosa, y seguramente servirá para que más de uno se anime a encarar la construcción de su robot.
Julio tiene 36 años, y su formación académica es FP2 Telecomunicaciones, que ha complementado con varios cursos de especialización en informática y programación.
¿Cuándo comenzaste a interesarte por la electrónica en general, y la robótica en particular?
La electrónica me ha gustado desde siempre. De niño, cuando mi padre me mostró los primeros componentes electrónicos (resistencias y LEDs) comenzó a despertar mi curiosidad. Por aquel entonces yo tenía unos 6 años de edad, y esas "cositas" me gustaron tanto que antes de entrar en FP ya leía "a vista" y con mucha rapidez, el código de colores de las resistencias.
La robótica me ha interesado desde siempre. Ya en octavo de EGB (Enseñanza General Básica) vi una película en la cual había un robot perro. Solo con el recuerdo de eso fui capaz de hacer uno de madera "a mi manera", utilizando un motor de coche dirigido que desmonté, le puse un circuito que activaba un relé con la detección de luz de una fotocélula. El relé cambiaba de sentido de giro del motor y utilizando el mismo sistema del coche desmontado logré que el robot girara al ir hacia atrás. Ese fue mi “robot con miedo a la luz” y la profesora de EGB no daba crédito a lo que veía: le apuntaba con una linterna o encendía delante de él un mechero y el robot huía.
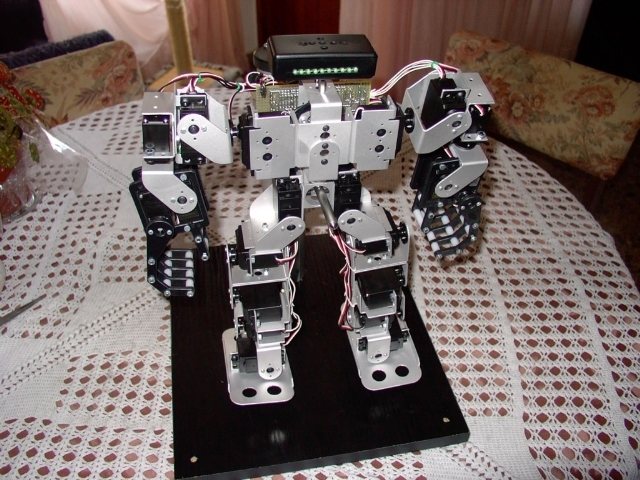
- Esta es la "espalda" de Robby.
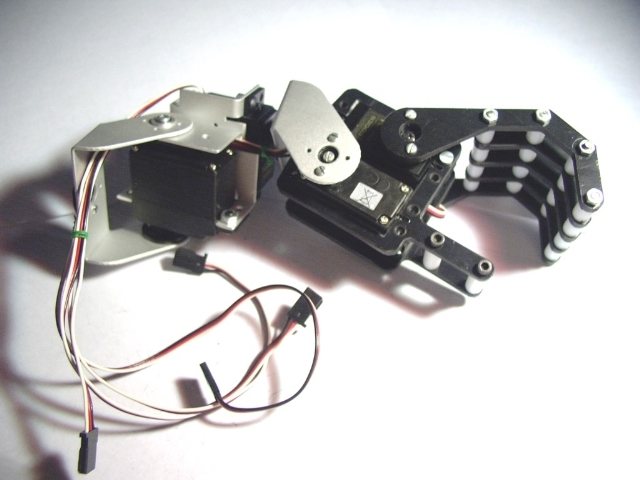
- Detalle de una de las manos robóticas.

¿Cuántas horas has dedicado al diseño y construcción de Robby?
Hace exactamente un año llevé a Robby a un “campus party”. Por aquel entonces era incapaz de andar, tan solo y con mucho esfuerzo lograba mantenerse erguido. Estuve más de medio año construyéndolo. Tenía muy claras algunas cosas pero desconocía otras muchas con lo cual ya llevo casi dos años con él y muchas pruebas fallidas.
El "cerebro" de Robby es un ordenador. ¿Por qué?
El cerebro de Robby es un ordenador porque ha sido la forma más fácil de hacer las secuencias de movimiento. Gracias al ordenador y al software que diseñé puedo "ver" los movimientos de cada articulación, así que puedo intuir a golpe de vista lo que va hacer o lo que quiero que haga. Otro motivo importante es que ahora mismo es muy fácil conectarle un módulo Bluetooth o un modulo Wifi para controlarlo. El ordenador es una ventaja para esto.
No obstante, estoy trabajando para mejorar eso, y dotar a sistema de cierta movilidad y mayor autonomía. Quiero dotarlo de una electrónica más potente y que sea capaz de almacenar los movimientos. También estoy viendo la posibilidad de incorporarle un control de estabilidad para las inclinaciones, de esta forma pasará de ser un robot con movimiento estático (sin emplear la inercia y controlando la gravedad en todo momento) a ser un robot con movimiento dinámico (aprovechando la inercia como hacemos las personas inconscientemente al caminar).
De momento, esto plantea un desafío, ya que Robby pesa mucho (1950 gramos) y cada añadido físico es un problema que se traduce en más peso y por lo tanto un inconveniente a la hora de ejecutar los movimientos, sobre todo caminar.
¿Por qué has empleado servos de aeromodelismo en lugar de motores?
Pues he utilizado servos porque la forma de controlarlos es mucho más sencilla, los motores implicarían crear electrónica de control adicional, cosa que no es necesario hacer los servos.
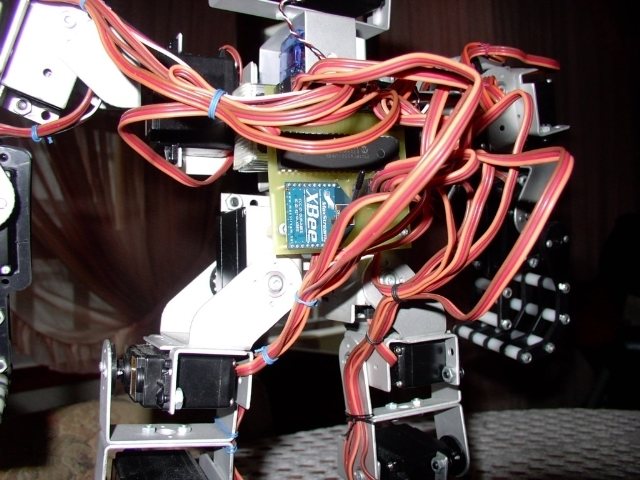
- Este es el módulo de comunicaciones.
- Robby es una creación de Julio Montagut, un español de 36 años.

¿El diseño de este robot es "público" o piensas comercializarlo?
El diseño de este robot, en realidad no es mío 100%. Esta clonado, o inspirado, en el de una empresa llamada Lynxmotion. Me pareció muy robusto y gracias a que trabajo en un taller de metal lo pude llevar a cabo. Por supuesto he hecho bastantes modificaciones, así que se podría decir que es una mejora de un modelo comercial. Con respecto a lo de comercializarlo yo no soy una empresa ni me dedico a esto, para mi es solo un hobby, y no tengo pensado comercializar el robot. Sin embargo, sí vendo alguna placa de control y software de servos por si alguien se anima y quiere hacerse su propio Robby, con lo que saco pagos los gastos.
¿Cuánto crees que habría que gastar para hacerse un "Robby" en casa?
Bueno, a mí me ha salido realmente barato, no creo que haya llegado a gastar 500 euros. Un modelo similar, disponible comercialmente, cuesta unos 700 euros. Sin embargo he de decir que Robby puede ser mejorado en calidad de movimientos y rapidez de ejecución con servos más capaces y con una batería más potente, aun queda corto en estos aspectos. Por supuesto, esto lo encarecería proporcionalmente. Para hacerse una idea, cada servo empleado en Robby ronda los 18 euros y los que yo pondría ahora cuestan cerca de 40.
Algo que me gustaría añadir es que en Robby he utilizado unos módulos de comunicación con el protocolo Zigbee (xBee). Este protocolo es muy actual, trabaja a 2,4 Ghz y es muy similar al Wifi. Su alcance es de 100 metros pero se puede cambiar por los inmediatamente superiores (xBee-Pro) sin hacer ninguna modificación eléctrica, consiguiendo un alcance fiable de una milla (1600 metros). Me pareció una opción mucho mejor que el Bluetooth de solo 10 o 50 metros.
Leyendo las respuestas de Julio, parece que encarar un proyecto de este tipo es algo realmente sencillo. Y, de hecho, lo es. Pero se necesita mucha paciencia y ganas de investigar para que el proyecto llegue a buen puerto.
En NeoTeo quedamos a la espera de que Julio termine las modificaciones que tiene pensadas para Robby, para publicar nuevas fotos de su invento.
¡Gracias por tu tiempo, Julio!
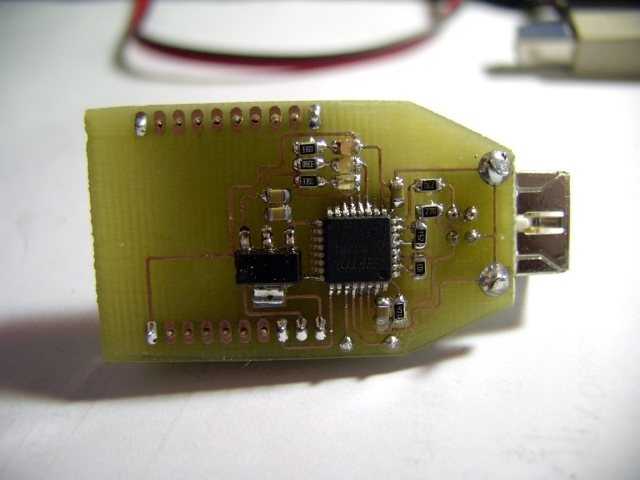
- Este es el "XBee", módulo que libera a Robby de los cables.
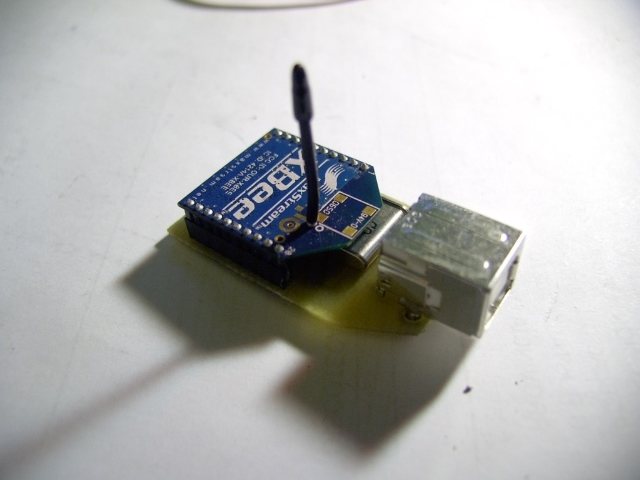
- Otra vista del módulo.


Un máquina sí señor :D!!!
me acaban de llegar los modulos xbee pro y quiero echarlos a funcionar voi a utilizar un pic 18f40 serias tan amable de mandarme algunos tips , programo el micro en picc. muchas gracias soy de mexico.
me gustaria intercambiar alguno conocimientos con julio, si me pudierais dar su mail os estaria muy agradecido
hola muy buen blog pero quisiera saber si me pueden ayudar a hacer un robot siguelineas algo facil!!! por favor!!