


Todos nos llenamos la boca hablando de reciclar, de aprovechar recursos y de no generar cada día más e-waste (basura electrónica). Aquí tienes una opción muy interesante para cuando no dispongas de un servomotor para tus aplicaciones. Al comprender, ver y analizar cómo funciona este método alternativo que aquí te proponemos, encontrarás muchas aplicaciones donde comprenderás que un servomotor es una pieza suntuosa y muchas veces reemplazable. Descubrir diversidad de técnicas de trabajo y abrir nuestra mente a diferentes opciones de desarrollo nos ayuda a enriquecer nuestro arsenal de posibilidades cuando los recursos no están disponibles.
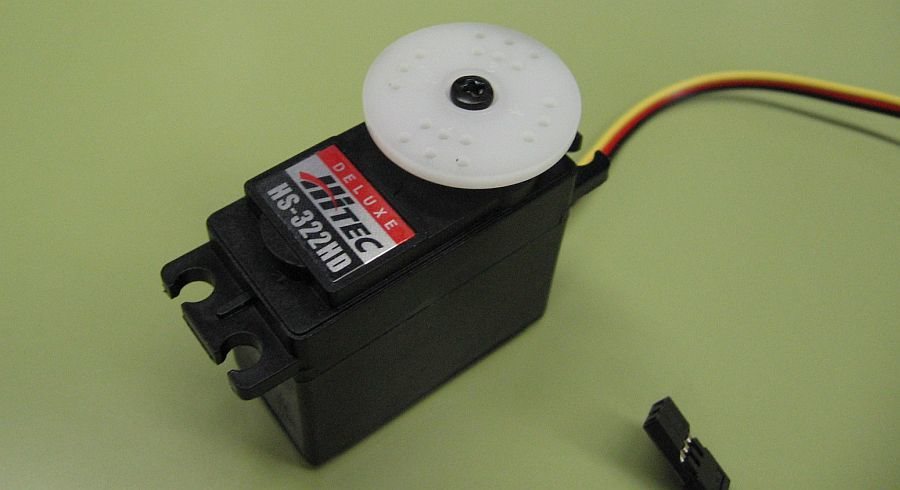
Cuando se habla de movilizar pequeños objetos útiles y funcionales dentro de un sistema complejo como puede ser una cámara web, un sensor, una herramienta o todo aquello que necesitemos posicionar en un determinado lugar en el espacio, siempre se piensa en servomotores. En NeoTeo ya hemos hablado de estos geniales dispositivos que llegaron para solucionar la mayoría de las necesidades que surgen al momento de posicionar un elemento útil, como dijimos antes, en cualquier lugar en el espacio. Además, en la Web existen infinitas páginas dedicadas a sus aplicaciones y características técnicas, donde podemos encontrar ejemplos en los que se detallan sus características, modos de empleo, y variedades.
Como puede sucederle a cualquiera, poner a funcionar un servomotor no siempre resulta una tarea sencilla. Para esta actividad lo habitual es apelar al uso de pequeñas rutinas y aplicaciones basadas en microcontroladores programados en el lenguaje que más cómodo y simpático nos resulte. Pero siempre suceden cosas que no podemos evitar: puede suceder que en un día feriado se nos ocurra una brillante idea para construir un sistema activo, móvil y con una aplicación estupenda, pero nos desayunamos con la triste noticia de que no tenemos servos disponibles para utilizar y todo la magnificencia de aquella idea brillante termina estrellada contra el suelo en un instante.
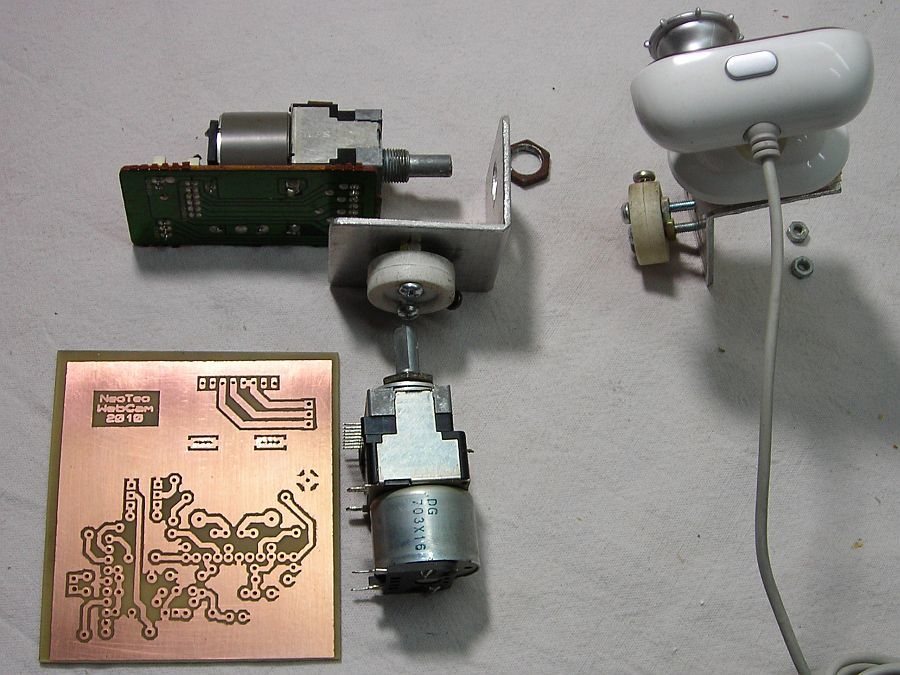
Sin embargo, un dispositivo que puede sustituir a un pequeño servomotor puede encontrarse en el lugar menos esperado. Ese lugar es el control de volumen de cualquier equipo de sonido antiguo. Durante mucho tiempo los controles de volumen de estas cadenas de sonido traían unos potenciómetros (reóstatos, resistores variables) con un mecanismo algo particular para controlar el volumen de audio. Estos dispositivos poseían una motorización especial que se podía manipular mediante el mando a distancia. Desde la comodidad del sillón de la sala, bastaba con oprimir una tecla y ver cómo la perilla se movía sola; toda una maravilla para aquellos tiempos. Hoy la mayoría de esos equipos están abandonados, sin uso y en algunos casos, sin posibilidades de reparación. Allí está nuestro “servomotor experimental” esperando por nosotros. Busca entre tus viejos trastos, seguro encuentras alguno.
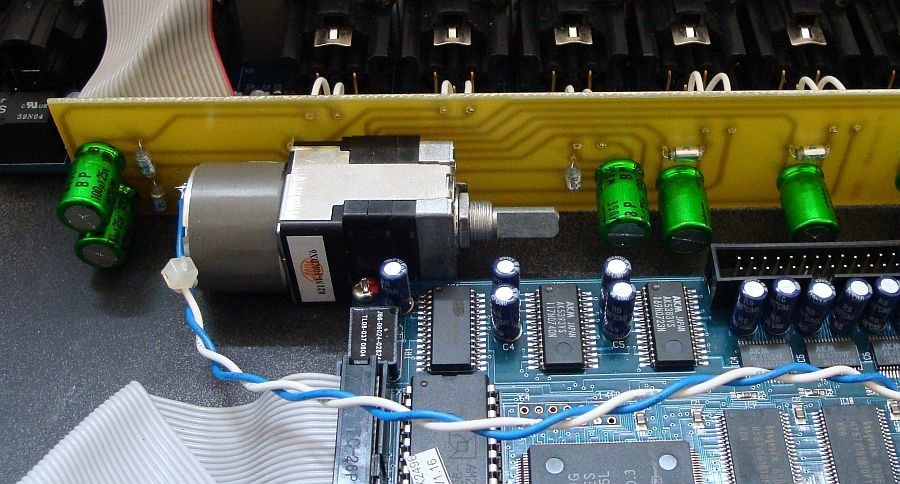
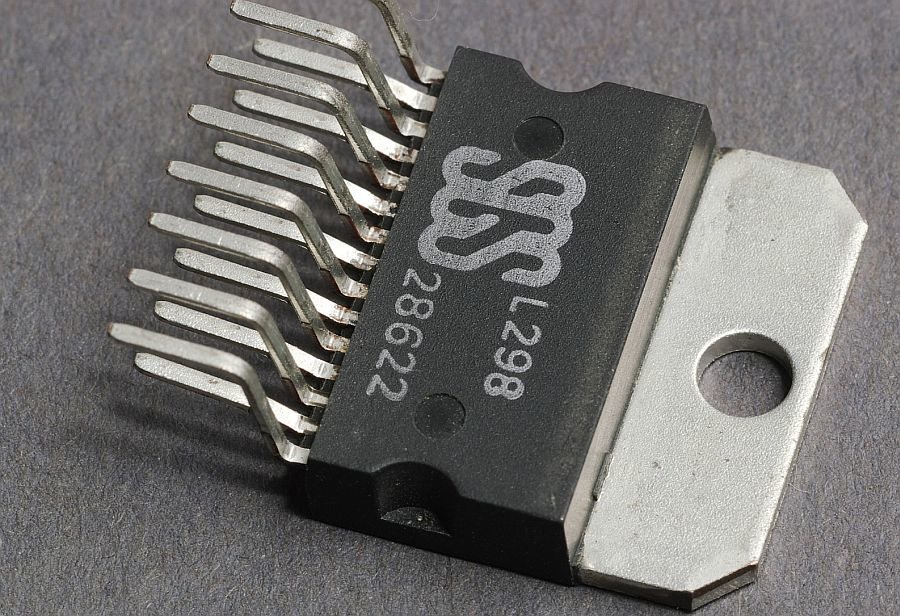
Las conexiones que un sistema electromecánico de esta clase posee son mucho más simples que las de un servomotor. Aquí no necesitamos un pulso con un ancho específico y a una frecuencia determinada ni nada que se le parezca. El sistema impulsor es un motor de corriente continua reversible (es decir, que tiene la propiedad de girar en cualquiera de los dos sentidos) y sólo necesitamos un pequeño puente H para su puesta en funcionamiento. Llegados a este punto, todos asociarán un L292, un L293 o un L298 para realizar este trabajo, pero debemos razonar con lógica y tener presente que dentro del mismo equipo (donde encontramos el potenciómetro motorizado) hallaremos el puente H necesario para energizarlo, el mismo que cumplía esa función dentro del sistema. Es decir, una forma más de darle sentido a las palabras reciclar, recursos disponibles, sistemas alternativos, etc.
Y no sólo en esta aplicación podemos encontrar circuitos integrados que en su interior posean un puente H integrado. Los podemos hallar en aparatos tan disímiles como puede ser una antigua VCR en desuso o un viejo reproductor de CD/DVD que ya no sea útil. Es decir, lo interesante de una misión creativa es emplear todos aquellos materiales que ya no utilicemos. Demás está mencionar el resto de la ferretería: tornillos, chapas, perfiles, soportes, tuercas y todos los elementos que podamos reciclar de cualquier viejo trasto. Tanto texto que consumimos a diario acerca del aprovechamiento de los recursos, de la reutilización de materiales, de energías renovables y de reciclar componentes. Muy bien, amigo, basta de palabras. Este es el momento de hacerlo.
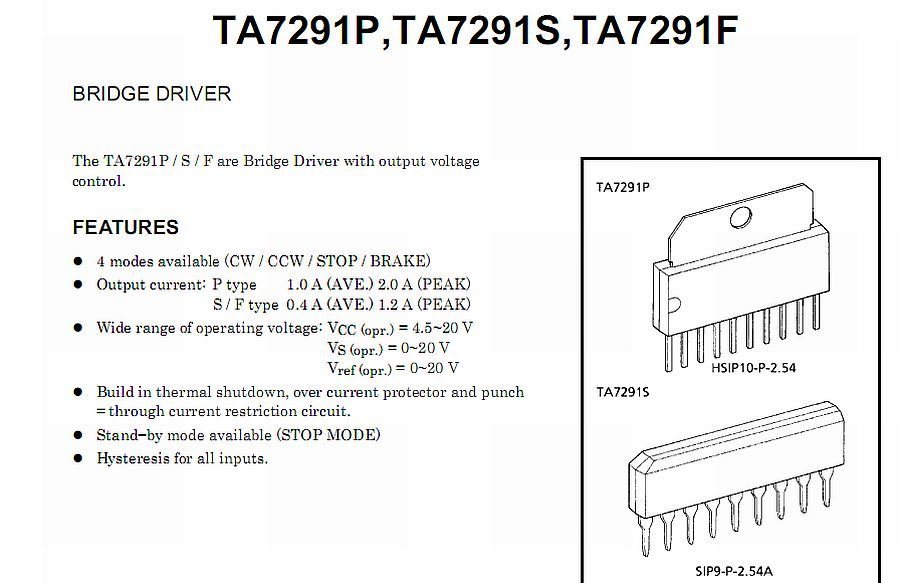
El puente H que hemos encontrado en un viejo centro musical es el TA7291S que posee (además de la lógica posibilidad de impulsar un giro en cada sentido al motor conectado) el recurso del freno dinámico. Es decir, si en algún momento la gravedad o el impulso que trae un objeto que estamos movilizando intenta jugarnos una mala pasada, tener a nuestra disposición un freno dinámico puede resultar muy útil. En nuestra aplicación no será tan necesario ya que no manejaremos objetos voluminosos y pesados ni velocidades importantes, pero siempre es bueno conocer las posibilidades que nos presenta los dispositivos. Estas bondades, cuando son bien aprovechadas en el software, nos permiten ejecutar acciones beneficiosas para el desempeño de nuestro desarrollo. De hecho, en el listado del programa del PIC podrás encontrar dónde utilizamos esta función para favorecer un mejor rendimiento mecánico final.
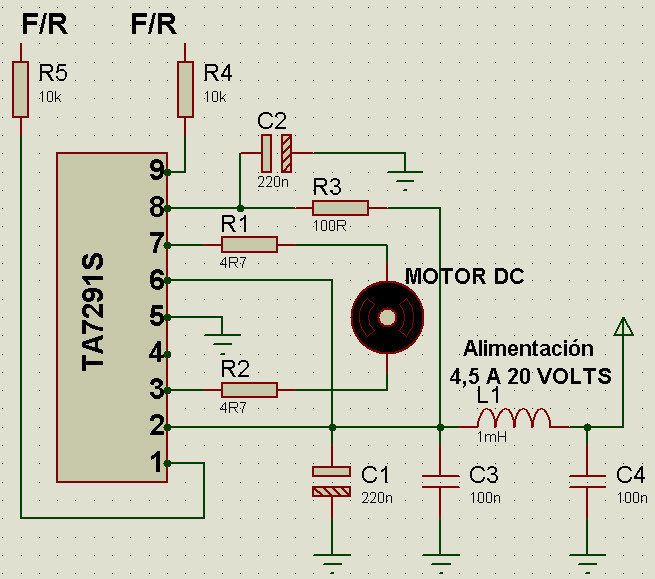
El TA7291S permite trabajar con pequeños motores de hasta ½ Amper de consumo, mientras que la versión finalizada en letra P (TA7291P) será capaz de operar de manera satisfactoria hasta con corrientes de un Amper. Estos valores son muy cómodos para utilizar motores reciclados de reproductores de CD, ya sea del sistema lector como de los aplicados a los movimientos mecánicos de carga y posicionamiento de los discos dentro del equipo. Uno de los usos más interesantes de este conjunto IC-Motor se encuentra en los robots de reconocimiento y exploración para el manejo y posicionamiento de las cámaras de a bordo. Además, la posibilidad de poder utilizar alimentaciones desde los 4,5Volts hasta los 20Volts, tal como menciona la hoja de datos de este IC, nos brinda una flexibilidad de uso y aplicaciones muy amplias.
Con la utilización de este circuito integrado queremos ejemplificar que el mundo de los puentes H integrados no se termina en el L292, el L293 o el L298. Siempre existirá una solución acorde a cada necesidad de aplicación. En este caso, el TA7291S fue nuestra solución. Quizás tú la encuentres en cualquier otro circuito integrado recuperado de un cacharro en desuso. Si crees que tienes la capacidad y el conocimiento necesario para abordar la construcción de un sistema de posicionamiento asistido de manera electrónica, no tendrás demasiados inconvenientes en descubrir las posibilidades que te brindan muchos componentes que tienes allí guardados. Recuerda que en la Web dispones de muchas páginas en las que puedes buscar las hojas de datos de los componentes asociados a los sistemas motrices y saber si pueden ser útiles o no. Además, allí está el verdadero espíritu de la experimentación.
Existen algunos detalles que diferencian el uso de este sistema de movimiento de objetos respecto al uso de los servomecanismos. Estos detalles deben tenerse en cuenta al momento de desarrollar una aplicación. Por ejemplo, el efecto que provoca la gravedad sobre las cargas mecánicas aplicadas debe ser objeto de un análisis importante. Si no disponemos de un sistema de freno mecánico efectivo y deseamos utilizar el mecanismo para elevar una carga, puede suceder que luego de ser izada termine descendiendo nuevamente (en forma suave o brusca). Recordemos el principio de funcionamiento de este sistema: un motor de corriente continua mueve un sistema de engranajes que mediante un embrague mecánico transfiere energía mecánica y giro al eje (donde se montaba la perilla del potenciómetro). Si deseamos mover de manera manual el mencionado eje, podemos hacerlo gracias al empleo del embrague mecánico (por eso podíamos subir y bajar el volumen en forma manual en el equipo de sonido).

Este “detalle”, que lo diferencia de los servomotores tradicionales, brinda (como tantas cosas en la vida) beneficios y desventajas. La desventaja más importante y notoria es el nivel de torque que tendrá el sistema (fuerza motriz, potencia). En este punto, nuestro pseudo – servo tendrá carencias para mover objetos pesados capaces de vencer la adherencia del embrague mecánico interno. En cambio, el beneficio más importante estará centrado en la suavidad de movimientos con cargas livianas, gracias a la posibilidad de alimentar el sistema con diversos niveles de tensión para obtener diferentes velocidades y tiempos de respuesta. Esto también es posible con un servomotor, pero la complejidad para lograr este tipo de funcionalidad se incrementa. Además, las cargas mecánicas acopladas al eje de lo que antes era un potenciómetro pueden ser cambiadas de posición en forma manual en cualquier momento, sin necesidad de desconectar la alimentación como sucede en un servomotor tradicional.


Otra ventaja importante es el uso del potenciómetro incorporado. Desde aquí podremos obtener una realimentación que nos informará a cada momento la posición exacta de cada parte móvil que compone el sistema. Esta es una ventaja que muchos servomotores de bajo coste no poseen. Como dato adicional podemos agregar algo que puede parecer muy obvio a esta altura del artículo: no pretendemos reemplazar al clásico servomotor con esta clase de dispositivos que aquí te mostramos; pensar de ese modo sería una tontería. Sólo te presentamos una segunda opción (incluso más sencilla y económica) cuando las posibilidades lo permiten.
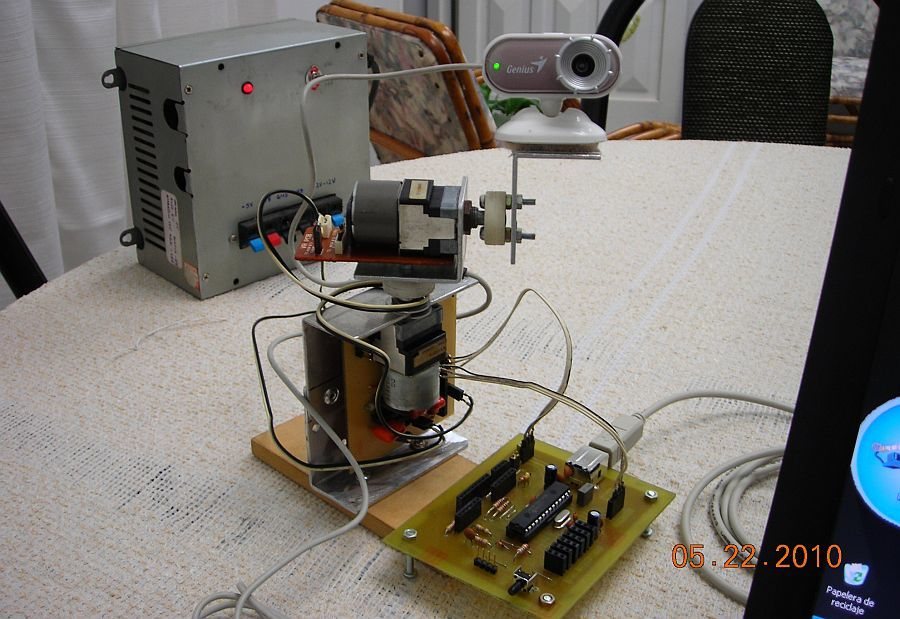
Para la aplicación que se observa en los videos de demostración, preparamos un pequeño software para mover nuestro sistema “Orientador de cámara web” desde los botones en pantalla como desde las teclas correspondientes a las letras U, D, L y R. Todo el control se realiza desde la conectividad USB que nos brinda nuestra placa entrenadora con el PIC 18F2550. Debido a que operar un circuito integrado de estas características (el TA7291S) es tan sencillo, seleccionamos esta opción por sobre el uso de tan sólo cuatro pulsadores conectados a las entradas de dirección de cada IC. Como era de esperarse, nos pareció más interesante armar un pequeño desarrollo donde se pueda ver un nuevo y orgulloso uso de nuestra placa entrenadora. Recuerda que si tu aplicación no requiere un manejo mediante microcontroladores, puedes activar las entradas del TA7291S aplicándole una tensión de 5Volts. Para conocer a fondo las posibles combinaciones de giros y de freno, no dejes de consultar la hoja de datos del circuito integrado que decidas utilizar en tu aplicación.
