


Los motores Brushless son utilizados en una variedad muy importante de aplicaciones. Por supuesto que no vamos a enumerar a todas ellas porque caeríamos en el error de olvidarnos de alguna. Las antiguas VHS utilizaban este tipo de motores para hacer correr la cinta (Capstan) y para hacer girar el tambor porta-cabezas (Drum) encargado de obtener la información almacenada en la cinta. Este último motor será nuestro centro de atención y con él realizaremos la práctica de controlar su velocidad en forma absoluta mediante un lazo enganchado en fase, también conocido como PLL (Phase Locked Loop). ¿Qué podemos hacer con un motor de una vieja VHS? Lee el artículo y te sorprenderás.
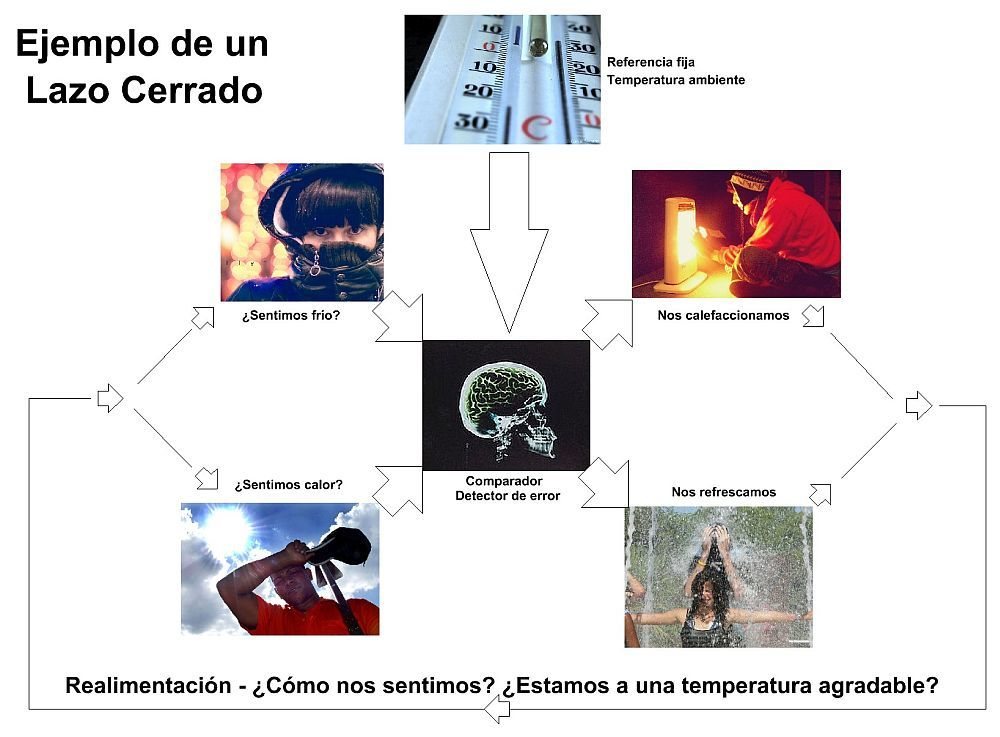
Poner en práctica un sistema con realimentación de información para mantener un funcionamiento deseado y corregir posibles errores durante el proceso es algo tan antiguo como la humanidad misma. Si hace frío, nos abrigamos. Si sentimos calor con tanta ropa, nos quitamos algunas prendas hasta encontrar el equilibrio de sentir una temperatura agradable. Me creerás o no, pero esto debe ser uno de los servosistemas más antiguos que la humanidad conoce. Antes de avanzar podemos definir e interpretar lo que significa “servosistema”. Según el AIEE (American Institute of Electrical Engineers), “un sistema de control por realimentación es aquel que tiende a mantener una relación predeterminada entre una variable de sistema y otra, comparando funciones de ambas variables y empleando la diferencia como medio de control”. Entonces, las variables del sistema serían: por un lado, la baja temperatura y, por el otro, nuestra sensación de lo que interpretamos como frío. De este modo, actuando nosotros mismos como medio de control, nos calzamos más prendas de vestir hasta dejar de sentir frío. Si nos pasamos en cantidad y tenemos calor, nos las quitamos. Y si comienza a hacer más frío, nos colocamos más ropa. De esta manera, un ciclo cerrado se mantiene de manera indefinida alcanzando un estado de equilibrio térmico agradable.
Para comenzar a ver de manera ordenada el funcionamiento del sistema iniciaremos el ciclo desde el Comparador o Detector de Error. Debemos ingresar a esta sección del lazo con una señal o información equivalente a lo que deseamos lograr como resultado de funcionamiento del sistema. Es decir, debemos introducir los datos que queremos ver “reflejados” como resultado final del trabajo que realiza el sistema. Por ejemplo, podemos ingresar con una tensión variable proveniente de un potenciómetro (o resistor ajustable) y a la salida obtener el comando de un timón o de los alerones de un aeromodelo. La realimentación que ingresa al Comparador o Detector de Error nos informará si el mecanismo siguió las instrucciones emitidas y si tomó la posición indicada cerrando así el lazo de manera estable cuando las señales de información se equiparen entre sí. En todos los casos, esta información (variable o fija) que ingresa como “Referencia” al Comparador o Detector de Error deberá poseer una exactitud importante para así obtener un sistema que sea capaz de funcionar a un régimen pre-establecido y con un alto grado de precisión.
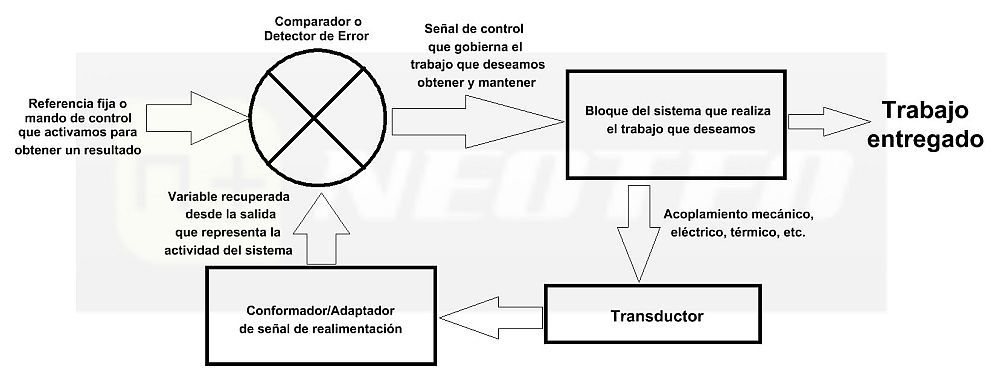
Imaginemos tener un sistema en el que una causa exterior (o interior) modifica de un instante a otro el mencionado régimen de trabajo. El sistema de control debe reaccionar y comenzar un trabajo correctivo que le ha sido asignado por el diseño, actuando con rapidez y precisión. Pero para que ello ocurra debe existir un elemento que tenga la capacidad de verificar la existencia de ese error. Ese elemento es lo que en un sistema cerrado se conoce como Detector de Error, al que podemos considerar como el componente “inteligente” del sistema a partir del cual se inicia el proceso de regulación. La acción del detector es comparativa, implicando que debe haber homogeneidad entre las señales sometidas a esa acción. Es decir, las señales a comparar deben ser equivalentes entre sí en magnitud y naturaleza, por ejemplo, dos señales eléctricas, dos informaciones mecánicas, dos oscilaciones, etc. Captar las variaciones experimentadas por la salida del sistema que intentamos controlar implica el uso de un Transductor.

Entre los requisitos fundamentales de un buen transductor están los de tener una adecuada sensibilidad para detectar y reaccionar frente al error, una elevada precisión y buena confiabilidad. Por lo general, la señal de error tomada por el transductor no posee la suficiente potencia y forma para excitar directamente al sistema comparador. En la mayoría de los casos, es necesario el uso de conformadores de señal y/o amplificadores para adaptarlas a una magnitud útil, de modo que el comparador o detector de error pueda (y sepa) interpretar. Resumiendo lo dicho hasta aquí podemos decir que tenemos una señal que indica el régimen de trabajo del sistema, un elemento ejecutor de la operación deseada, un transductor que toma información de cómo está resultando el funcionamiento, y un sistema “inteligente” que es capaz de darse cuenta (gracias a lo que el transductor le informa) si debe corregir el régimen de funcionamiento o no, cerrando de esta manera el lazo que forma nuestro Sistema de Control Automático o Servosistema. (Servo, del latín “servus”: esclavo).

Hablemos del motor DRUM
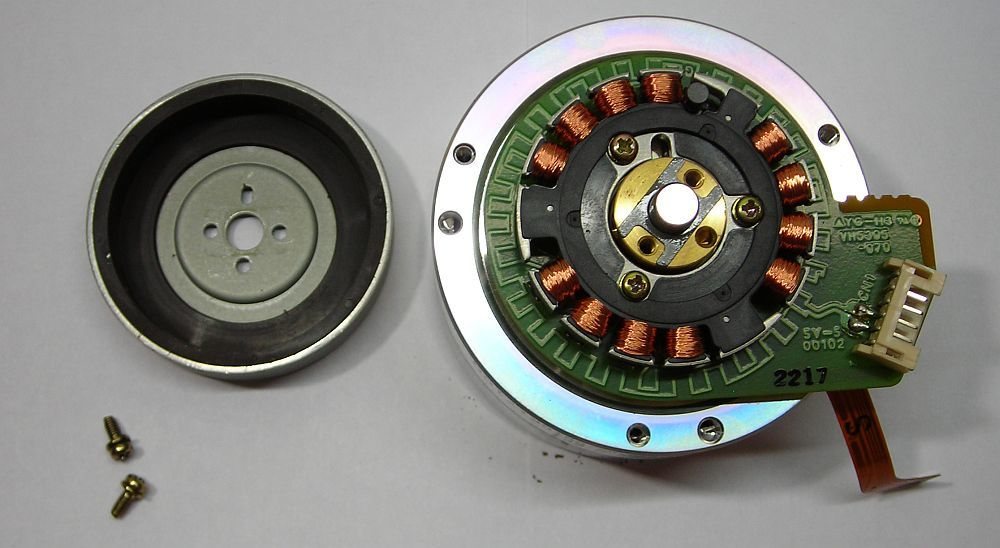
Existen infinitas aplicaciones de sistemas realimentados en electrónica. Podemos mencionar muchos ejemplos entre los que se destacan los sistemas de sintonía de los TV, los controles de velocidad de los motores de un DVD Player, de un VHS, los circuitos osciladores que se emplean en una emisora de radio, el control de posición de un brazo mecanizado (robot), un radar, un sonar, el timón de una embarcación, un amplificador de audio de buena calidad, y una lista interminable de aplicaciones donde encontraremos el uso de un sistema retroalimentado o realimentado. Lo que motiva a este artículo es la utilización de un motor que encontraremos disponible en cualquier tienda de Electrónica o entre los trastos viejos en nuestra casa. Nos referimos al motor porta-cabezas de cualquier VHS ya abandonado y reemplazado por el DVD (que también pronto abandonaremos). El nombre con el que se lo conoce a dicho motor es DRUM. Reconócelo en las siguientes fotografías.
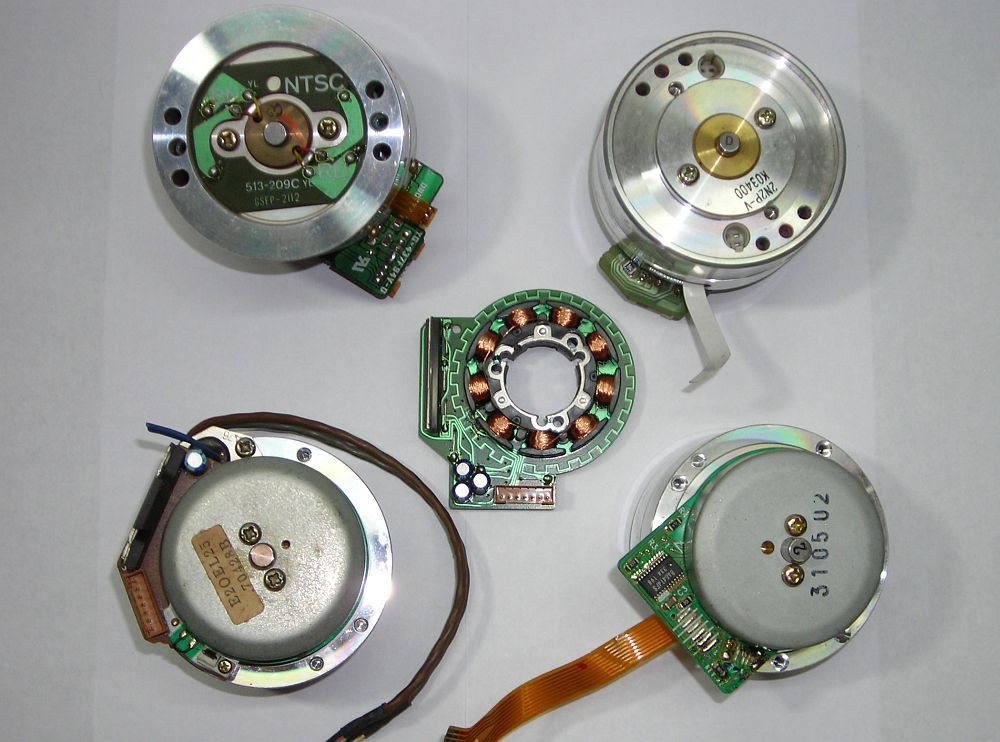
Estamos hablando de un motor del tipo Brushless (sin escobillas) de tres fases que nos permite desarrollar técnicamente toda la teoría enunciada hasta aquí, pudiendo destinar su uso a aplicaciones que requieran un control exacto de la velocidad. Estos motores poseen un conector que los enlaza al exterior y que variará de un fabricante a otro, de un diseño de motor a otro, por lo que no podemos expresar un orden de conexionado igualitario para todos los motores que consigamos. Es decir, no todos los motores son iguales y no todos los motores tienen el mismo tipo de conector para acceder a su funcionamiento. Además, todos los modelos son distintos, aunque utilicen el mismo circuito integrado para comandar el sistema trifásico interno.
Por lo tanto, debemos tomarnos el trabajo de descubrir nosotros mismos las conexiones que sí estarán presentes en cualquier modelo y tipo de motor Brushless Drum.
- Alimentación = +12 Volts
- GND
- Entrada de Control de Velocidad
- Salida Pulsos PG
- Salida Pulsos FG
Luego veremos la forma de encontrar y diferenciar estas conexiones. Ahora haremos un breve resumen de lo que trataremos de lograr, es decir, de los objetivos de nuestro trabajo.
- Hacer funcionar este motor.
- Obtener como resultado un régimen de RPM seleccionado a voluntad.
- Lograr una precisión casi absoluta (en un margen de error de pocas partes por millón).
Son tres objetivos ambiciosos pero muy reconfortantes al verlos al final del desarrollo. El sistema propuesto trabajará de la siguiente manera: (según lo muestra el diagrama en bloques que aquí te mostramos)
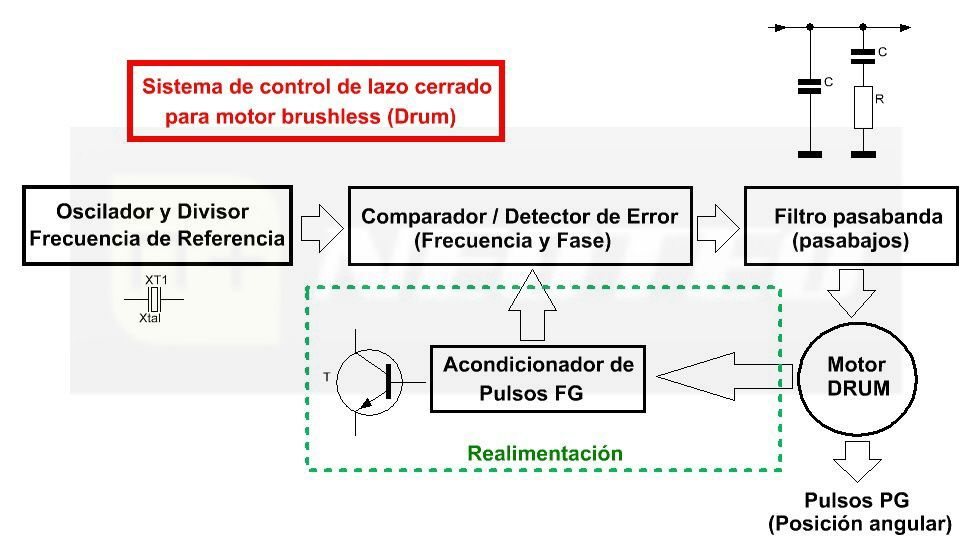
Resumiendo la acción
Nuestro objetivo será lograr un sistema enganchado en fase (PLL) para controlar un tipo de motor Brushless específico, como es el motor Drum de un VHS. El control de velocidad tendrá la exactitud que puede ofrecernos un sistema oscilador con un cristal de cuarzo. Al motor lo haremos girar a una velocidad fija de 2500 RPM, intentando mantener la velocidad tan estable como sea posible. Además, deberá ser capaz de autocorregirse ante agentes externos que intenten alterar esa velocidad. Con esta aplicación podremos ver muchos desarrollos interesantes, todos resumidos en un único propósito: el funcionamiento de un motor Brushless. No te pierdas las futuras entregas. Seguro que ni te imaginas dónde desembocaremos con el movimiento de este motor. Si aún no has comprendido la idea que perseguimos, observa este video y comienza a descubrir las infinitas aplicaciones que puede tener este tipo desarrollo.
