Un verdadero Puente H para controlar motores de corriente continua debe ser capaz de entregar la máxima potencia posible para una mayor eficiencia operativa, con la menor cantidad de pérdidas de energía por temperatura y un diseño poco apropiado. En la primera entrega te mostramos la teoría de funcionamiento y los conceptos básicos y puntuales que no debes desatender. Como es lógico y habitual en NeoTeo, aquí llegamos con la parte práctica y tangible que siempre debe acompañar a una explicación teórica. Es decir, tal como dice la imagen cabecera, en este artículo encontrarás la verdadera acción dentro y fuera de un puente H. A partir de una placa y un circuito de demostración veremos todo lo importante que sucede alrededor de este sistema de control y los detalles a tener en cuenta para lograr un funcionamiento óptimo. Comencemos. La primera parte de este artículo estará enfocada a los circuitos necesarios para realizar las prácticas deseadas sobre el puente H y con un pequeño repaso de los fundamentos teóricos que ya vimos en el artículo anterior que, como mencionamos en la introducción, debemos tener presentes para una interpretación adecuada de lo que aquí veremos y desarrollaremos. En primera instancia vale recordar que controlaremos sentido de giro, velocidad y frenado de un motor (al azar) de corriente continua. El segundo punto importante a tener en cuenta es que utilizaremos transistores MOSFET para dar forma y cuerpo al puente H. Como recordarás, estos transistores necesitan de una tensión en el terminal Gate comprendida entre los 2 y 5 Volts por encima de la tensión de Source, para una conducción plena. Es muy importante que tengas presente este concepto ya que de lo contrario, el transistor no conducirá en forma plena y disipará un calor acumulativo que puede llevarlo a zonas de trabajo peligrosas. Además, por no conducir en toda su capacidad; es decir, si Ron (resistencia interna en conducción) no llega a un mínimo valor posible entre los terminales Drain y Source de los mencionados transistores MOSFET; existirá una diferencia de potencial importante entre Drain y Source y en consecuencia no llegará la tensión adecuada al motor. De este modo, el régimen de trabajo del motor no será el más apropiado pudiendo acortar su vida útil o logrando un resultado menos satisfactorio al esperado. Por último, vale refrescar el modo de funcionamiento del sistema y la manera en que se activan los transistores MOSFET para un giro y frenado apropiados. La placa de pruebas que utilizaremos incluirá elementos muy conocidos por ti y que venimos utilizando en muchos artículos aunque en este caso los combinaremos de un modo particular para obtener el resultado deseado. Utilizaremos un PIC 16F628A, una fuente de alimentación de 5Volts con un 7805 a partir de una batería de 12Volts y un sistema de toroide de ferrite de entrada para prevenir el ingreso de ruidos eléctricos extraños al sistema. Recordarás que hemos mencionado muchas veces la importancia de tener circuitos libres de ruidos eléctricos para evitar sorpresas desagradables durante el funcionamiento del firmware de un microcontrolador. El filtrado y eliminación de todos estos transitorios indeseados son siempre una necesidad para evitar dolores de cabeza cuando el sistema ya está construido. Pueden parecer componentes redundantes en algunos casos, pero cada capacitor debe estar colocado en el lugar adecuado para un óptimo desempeño de los circuitos. El resto de la fuente de alimentación es clásica y destacaremos en ella la inclusión de diodos protectores de inversión de polaridad y zeners para evitar dañar los sistemas en caso de, repetimos, inversiones accidentales de polaridad o conexiones a fuentes de alimentación inapropiadas. Un cargador de baterías defectuoso, puede arruinarte todo un trabajo enorme por el mero hecho de no haber incluido o haber intentado ahorrar en un diodo zener. Más severo aún cuando no colocamos un 1N4007 para protección contra inversiones de polaridad. Pequeños detalles que nos salvan de grandes, impredecibles y costosos accidentes. Luego, llega el turno del circuito que incluye los cuatro transistores MOSFET junto a sus correspondientes formadores de pulso. Sub-circuitos vitales al momento de trabajar con PWM y que se resuelven con sólo tres transistores. Por supuesto que para las cuatro ramas del puente H necesitarás 12 transistores en total, pero un gasto de medio euro en ello no será algo que destruya tu presupuesto mensual. Por el contrario, esta inversión te será muy útil para lograr un desarrollo apropiado, para obtener un funcionamiento correcto del motor a utilizar y además, (en NeoTeo creemos que es lo más importante) te servirá para aprender la teoría de porqué suceden las cosas. Dicho de otro modo, para que puedas encontrar las respuestas y las demostraciones prácticas de cómo funciona un desarrollo, cualquiera sea. El PIC utilizado, como te habíamos mencionado antes, será un 16F628A funcionando con un oscilador externo a 4Mhz, cuatro pulsadores para funciones varias (sentido de giro, parada y modo de funcionamiento), cuatro LEDs que nos mostrarán en tiempo real la activación de cada transistor que compone el puente H, es decir, cuál se activa a cada momento durante el trabajo y el infaltable conector ICSP (In Circuit Serial Programming) que nos permitirá cambiar el firmware sin retirar el PIC de la placa. De este modo, la experimentación se torna más ágil, más dinámica y con menores posibilidades de cometer errores tan frecuentes como insertar el IC al revés o deteriorar físicamente el PIC de tanto colocarlo y extraerlo del PCB. En el diagrama superior hemos dibujado un solo bloque formador de pulsos para atacar a cada uno de los Gates de los MOSFET, pero está indicado de manera muy clara cada salida del PIC con su destino en su respectivo transistor. Sólo deberás incluir las tres etapas que no están dibujadas del modo que indica el circuito. Por otro lado, los transistores MOSFET recomendados y que hemos utilizado en esta aplicación son los ya conocidos IRFZ44N mientras que los diodos “volante” (conectados en paralelo entre Darin y Source de cada MOSFET) deben ser del tipo “rápido”. Nosotros hemos seleccionado los BYW85C, pero en el caso de ser necesario, deberás reemplazarlos por otros de mayor capacidad de corriente. Para el propósito de ensayo y prueba con motores de mediano poder, los elegidos poseerán un desempeño sin inconvenientes. El último dato a destacar dentro del circuito es “Jump1” que se deja previsto para futuras y potenciales aplicaciones. Por allí circulará la corriente total que consuma el motor durante su funcionamiento y un shunt aplicado en ese espacio puede ofrecerte una información muy valiosa sobre el desempeño del sistema. Es decir, si el motor comienza a tener problemas o si el sistema mecánico acoplado a su eje presenta deficiencias motrices, verás reflejados estos inconvenientes en la corriente total de trabajo del puente H. En consecuencia, la toma de datos en ese punto puede habilitar un sistema de protección contra sobre-consumos eléctricos y/o sobre-cargas mecánicas. Con un sistema de alertas o acciones de protección puedes salvar un costoso equipo electromecánico de una rotura muy cara. Un simple amperímetro en ese lugar, conectado a través de la entrada ADC de un PIC (no en nuestra aplicación actual) o mediante el bus I2C, pueden completar el diseño y orientarlo a un sistema de control de alta gama con prestaciones profesionales.
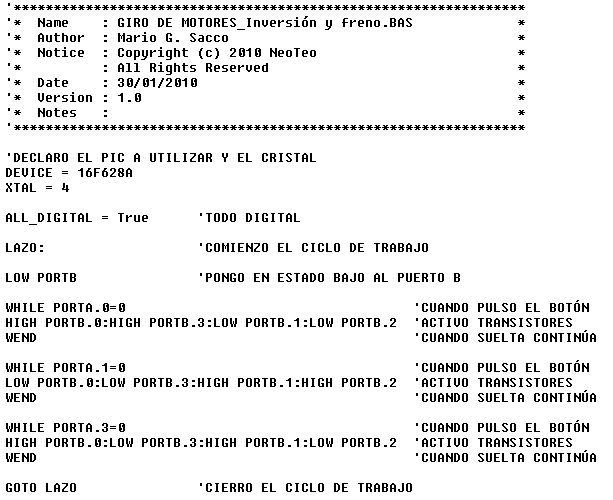
Poniendo en marcha el sistema Alimentando el sistema mediante una batería de 12Volts, vemos en el siguiente video un sistema inicial y elemental que nos permite el giro a máxima potencia en un sentido o en el invers, mediante la utilización de dos de los pulsadores ubicados en el PCB. Otro pulsador es empleado para aplicar el freno dinámico al motor a través de la conducción forzada de los transistores de las ramas inferiores del puente H, es decir, Q1 y Q2, según la imagen que muestra la distribución de los componentes en la placa y el circuito. El programa que incorpora el PIC funciona de manera muy elemental y contiene 3 lazos WHILE – WEND que se encargan de monitorear en forma constante el estado de los pulsadores. Cuando uno de ellos es presionado, activa una serie específica de instrucciones y al soltarlo, el sistema vuelve a un estado de reposo, es decir, inactivo. Además en el video, puedes apreciar con claridad el principio de funcionamiento del sistema de frenado dinámico mediante Q1 y Q2. Al activarse esta función, la Vfem que genera el motor al actuar en modo generador (libre de energía aplicada y en su camino a detenerse), se reduce a cero provocando el frenado del sistema. Cuando la acción de Q1 y Q2 se libera, puedes apreciar que se logran generar de manera muy sencilla y con poco movimiento de giro, tensiones que llegan cómodamente más allá de un Volt en contraste con el momento de frenado donde apenas alcanza los 2 miliVolts. Obsérvalo en el video y compréndelo mediante una aplicación práctica. Dicho de otro modo: una imagen vale más que mil palabras escritas.
Luego de ver el video, llega el momento en el que hacemos hincapié en el resultado observado. La alimentación al sistema es de 12 Volts y al motor le llegaban tan sólo 9 Volts debido, como se explica en el video, a que la tensión Vgs (Tensión Gate-Source), de los transistores de las ramas superiores del puente H, no logra alcanzar el máximo nivel para obtener una conducción plena de corriente entre Drain y Source. Aquí es donde se hace presente la aplicación del sistema elevador de tensión, utilizando el MC34063A, que se conecta a la línea de alimentación de los Gates y se selecciona mediante el jumper que se encuentra en la zona de la fuente de alimentación. De este modo, los Gates alcanzarán una tensión de activación que estará por encima de los 12 volts logrando que los transistores pasen a un estado de mínima resistencia de conducción, máxima circulación de corriente con una menor tensión Vds (Drain – Source) y en consecuencia, una menor disipación de calor. Observa en el video las variaciones de tensión en el motor al momento de variar la tensión externa para los Gates.
Ya tenemos el motor funcionando a máxima potencia. Sólo te falta encontrar la aplicación deseada donde sea necesario el giro en ambos sentidos y ya tienes la info necesaria como para activar el sistema. Además, la aplicación del frenado puede ayudarte a que un pequeño ascensor de una maqueta no se caiga o a que una herramienta de una máquina automática no se extienda más allá en su recorrido. Dicho de otro modo: Ya tienes la información teórica + Ya has visto la demostración práctica = Sólo te falta aplicarlo. En la próxima entrega veremos el sistema trabajando con PWM y variando su velocidad en un sentido de giro o en otro. También veremos como se realiza un programa capaz de activar un puente H mediante el sistema de modulación de ancho de pulsos. Jugaremos un poco con el frenado regenerativo (recuperar energía durante el frenado para recargar la batería), la aplicación de frenados variables de acuerdo a la necesidad de utilización y por sobre todo, la explicación paso a paso del programa que necesita el PIC para hacer funcionar el sistema de manera óptima. Seguiremos descubriendo secretos sobre el funcionamiento de estos desarrollos tan necesarios para nuestros trabajos en robótica y mecatrónica. Y recuerda esto: Lo mejor está siempre por venir.