
En la entrega anterior pudimos ver los conceptos básicos de un sistema controlado por un lazo de realimentación. Apreciamos además, un video con un motor Brushless Drum y un sistema de enganche de fase PLL (Phase Locked Loop) que se encargaba de controlar la velocidad de giro del motor utilizado, a pesar del maltrato ejercido por el editor de la nota. En la entrega de hoy veremos el circuito necesario para lograr esta aplicación, aprenderemos a identificar las conexiones de un motor brushless de esta clase y terminaremos de concretar la idea general de la utilidad de un sistema de lazo enganchado en fase (PLL).
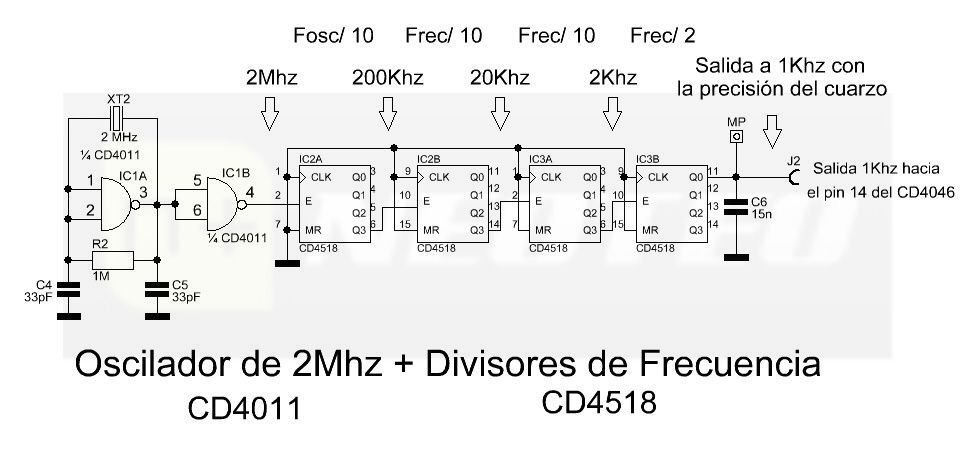
Cuando se menciona la expresión PLL, lo primero que debe aparecer en la mente de un desarrollador es la idea de una realimentación de información que será comparada con una referencia fija. En el ejemplo que veremos hoy, la referencia fija será un sencillo oscilador que estará construido sobre la base de una compuerta NAND. Para su realización usaremos un CD4011 (CMOS) y un cristal que poseerá una frecuencia no definida por ahora. Además, otra compuerta del mismo IC estará utilizada como buffer (seguidor) para no perturbar con el circuito acoplado la correcta y libre oscilación dictada por el cristal.
Luego, encontramos una cadena de contadores/divisores (CD4518) (CMOS), con los que obtendremos la frecuencia de referencia que usaremos para entrar al comparador empleado y, a través de éste, lograr la tensión del control de velocidad del motor, es decir, el régimen de trabajo que deseamos para el mismo. El Comparador mencionado es también conocido como Detector de Error y en nuestra aplicación es uno de los comparadores de fase que posee en su interior el circuito integrado CD4046 (CMOS).
Hasta aquí tenemos una parte del sistema. La otra parte se constituye a partir de una realimentación entregada por el dispositivo/elemento/circuito que estamos intentando operar. En nuestro caso, los motores Brushless DRUM poseen un bobinado estampado en el circuito impreso de su placa de control, el que nos entregará una serie de impulsos al girar el motor. De ahora en adelante, a estos impulsos de realimentación los conoceremos como Pulsos FG. Estos impulsos poseen una frecuencia que no va en concordancia con las RPM (Revoluciones Por Minuto) del motor, ni con las RPS (Revoluciones Por Segundo) que se obtengan durante el giro del motor. Las bobinas impresas están diseñadas para generar frecuencias acordes a su funcionamiento dentro de la circuitería del VHS y para nosotros será importante descubrir esta relación “vueltas/impulsos” para poder determinar la velocidad final de nuestro sistema.
Por ejemplo, durante la reproducción de video en sistema NTSC, un motor brushless Drum debe girar a 30 vueltas por segundo, lo que equivale a 1800 RPM, mientras que en el sistema de color PAL lo hace a 25 vueltas por segundo, es decir a 1500 RPM. Conociendo este dato, nosotros podremos movernos por todo el margen de velocidad que cubren estos motores, que en la práctica es de unas 1000 a 3000 RPM o más, dependiendo del motor que escojamos, pero para los efectos de un trabajo cómodo y eficaz, un régimen de alrededor de los 40Hz es más que suficiente. Luego de haber conocido estos valores podemos agregar también que, los Pulsos FG poseen 24 veces la frecuencia de giro en ciclos por segundo. Es decir, a 25 giros en un segundo (25Hz, 1500 RPM) tendremos una frecuencia de Pulsos FG de 600 Hz., para 30 giros en un segundo (30Hz, 1800 RPM) tendremos FG a 720 Hz; mientras que a 2500 RPM, lograremos una señal de Pulsos FG de 1Khz (41,66 vueltas en un segundo).
Conociendo estos valores ya podemos diseñar nuestro oscilador local, en función de las RPM que deseemos lograr del motor. Como mencionamos en el párrafo anterior intentaremos lograr una velocidad de giro de 2500 RPM para que el transductor del motor (la bobina impresa) nos devuelva impulsos FG a 1Khz. ¿Porqué decidimos usar este valor? Porque es fácil generar 1Khz a partir de un oscilador con un cuarzo de 2Mhz y un divisor por 2000 tal cómo hemos decidido hacer y puedes ver en el diagrama esquemático de la aplicación. Ustedes pueden adoptar un oscilador de 4,5 Mhz y un divisor por 7500 para lograr 600 Hz hasta alcanzar una velocidad de 1500 RPM. O tal vez quieran usar otro valor, de acuerdo a los cristales y/o divisores que posean. Lo importante es que comprendan que debemos lograr, a partir de un cristal de cuarzo y las divisiones de frecuencia posteriores, la misma frecuencia que nos entregará el bobinado FG para las RPM deseadas. Observemos cómo nuestro circuito genera la señal de 1Khz (1000Hz.) en el siguiente video:
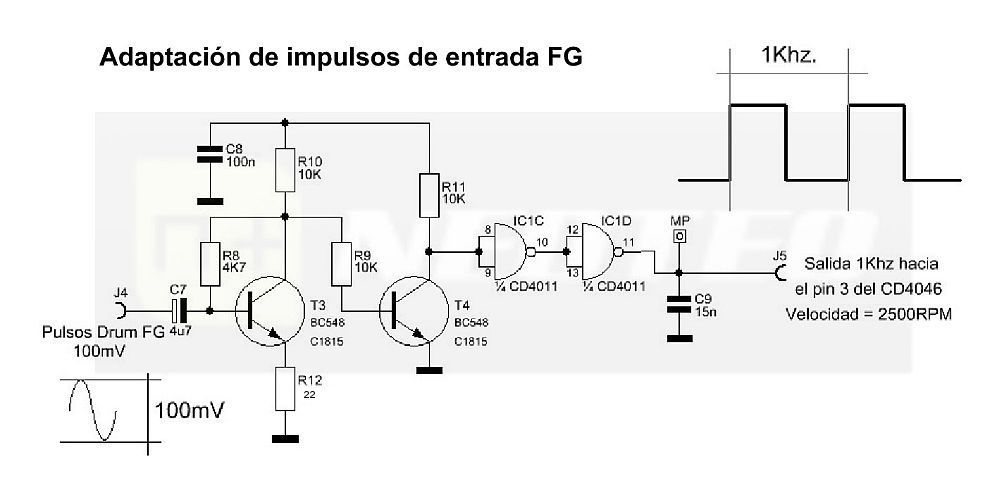
Los pulsos entregados por el bobinado FG, serán apenas una señal senoidal de poca amplitud que debemos adaptar en forma y nivel para poder atacar al Comparador o Detector de Error. Bastarán dos transistores NPN comunes (BC548, C1815) conectados en cascada para lograr en el segundo transistor una situación de saturación y corte debido a la alta amplificación del primer paso. Un par de compuertas sobrantes del CD4011 nos servirán para terminar de separar, obtener la amplitud correcta y darle la forma cuadrada a la señal que ingresará en el Comparador, de la misma forma que entrará la señal proveniente del oscilador fijo.
Siguiendo con la explicación del circuito, pasamos a la parte “inteligente” del proceso y nos encontramos con el Comparador o Detector de Error, que es uno de los dos comparadores de fase que posee en su interior el circuito integrado CD4046. Para darle mayor precisión al sistema y hacer un sistema más inmune a los ruidos externos, hemos decidido utilizar el Comparador de Fase II del IC. Esta etapa del circuito integrado, está formada por una serie de Flip-Flops que nos devolverán una tensión proporcional (en tiempo y forma), al desfasaje que exista entre las señales de referencia fija y la obtenida a través de los impulsos FG. Es decir, a mayor diferencia de frecuencia entre las señales entrantes, mayor señal de error. A medida que las frecuencias se van acercando entre sí, la excursión de la señal de error comienza a hacerse cada vez más estable, tratando de encontrar el exacto punto de igualdad entre ambas, hasta que la fase de las mismas coincida en el eje de tiempos. National Semiconductor nos ofrece, en la hoja de datos del CD4046, una muestra de las señales logradas utilizando los dos comparadores de fase del CD4046. Obsérvalas con atención:
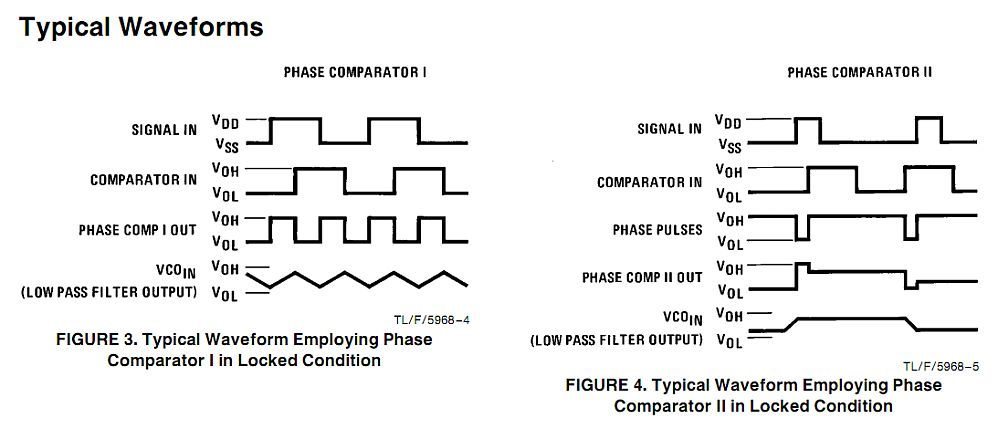
Observa que cuanto más alejadas estén las fases de las señales a comparar, más lejos estaremos de encontrar una tensión continua y estable a la salida del comparador de fase que intentemos utilizar. No dejes de apreciar también, que el funcionamiento de estas secciones del circuito integrado varían en su desempeño. Eso debe ser un elemento más para ser considerado dentro del desarrollo de tu aplicación. Acompañándote con la hoja de datos del PLL la tarea será más sencilla para comprender; porque sabrás interpretar que este no es un artículo que habla del CD4046 sino de una aplicación que lo utiliza. Por último, el circuito final compuesto por el oscilador a cristal, el amplificador de los pulsos FG y el comparador de fase que completa el sistema PLL se resumen en un circuito único que te mostramos a continuación.
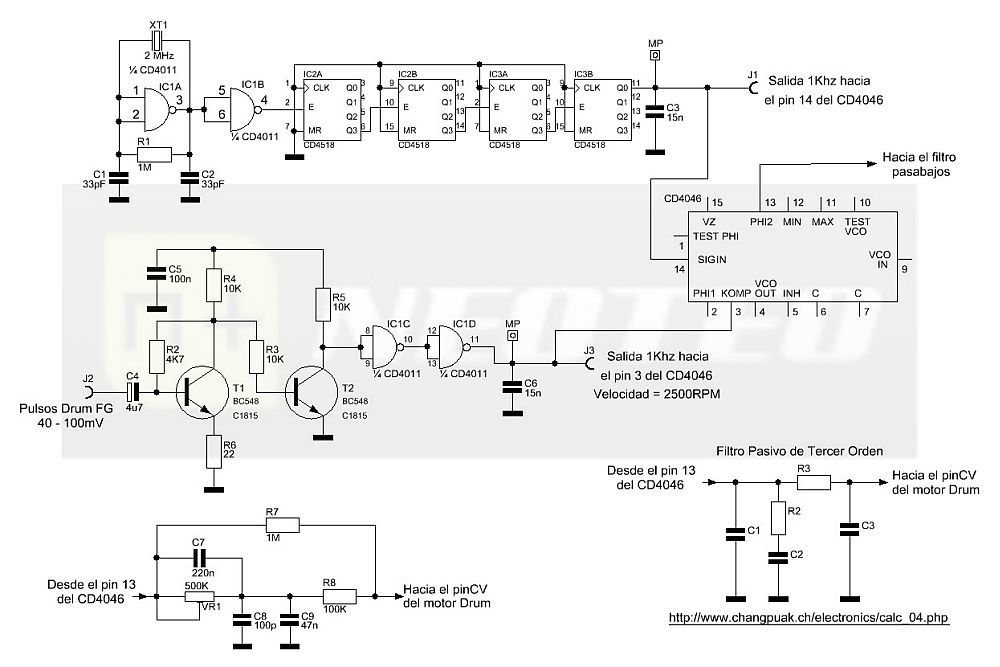
La salida del comparador de fase (pin 13) contenido dentro del CD4046, se aplica a un filtro pasabajos que se encargará de entregarnos una señal de error estable en nivel de continua. Esta señal de error estará acorde a la diferencia de frecuencias y fase de las señales que el mencionado comparador encuentre entre el giro del motor y el oscilador fijo. Aquí es donde empieza a cerrarse el lazo de control de velocidad del motor y el lazo enganchado en fase comienza a tener razón de ser y llamarse de ese modo.
En el instante inicial, cuando se conecta la alimentación al sistema, el motor comienza a girar de manera lenta hasta lograr lanzar en velocidad al tambor y al rotor. Recuerda que hay una masa mecánica que hay que impulsar y controlar. No estamos ante un simple oscilador que se controla con apenas micro-amperes y se estabiliza en milisegundos. Esto es como comparar a un Airbus A380 con un parapente. A medida que comienza a adquirir velocidad el motor, el impulso de funcionamiento continúa incrementando la velocidad debido a que el Comparador sigue entregando una señal de error importante en nivel. Esto será así hasta que la frecuencia del oscilador de referencia (a 1Khz) coincida con los impulsos FG. En ese momento se “engancharán” ambas señales y comenzará a mantenerse estable la velocidad con una exactitud sorprendente, pese a las perturbaciones externas que puedan intentar desestabilizar el equilibrio alcanzado por el sistema.
El rol protagónico del Filtro Pasabajos
Como en todo sistema de lazo cerrado, encontraremos un eslabón crítico para mantener un equilibrio armónico y en este caso, ese rol le corresponde al “filtro pasa-bajos”. Por desgracia, es bastante complejo encontrar en la web o en medios impresos información precisa y certera acerca de los IC utilizados en estos motores brushless Drum que encontramos dentro de los equipos VHS. Esta limitación dificulta a cualquier diseñador, debido a la escasa información, para calcular correctamente un “filtro pasa-bajos”. Además, este filtro variará de un motor a otro, debido a que no todos los motores existentes utilizan el mismo IC que ejecuta la función de Driver para las tres fases del motor.
Existen muchos fabricantes con conceptos de diseño muy diferentes unos a otros. Los criterios empleados en la construcción de dichos IC varían drásticamente ente dos motores que en apariencia son idénticos. Estas desigualdades arrastrarán diferencias entre los valores requeridos de corriente y tensión de funcionamiento para la entrada CV o Control de Velocidad. Por este motivo es muy lógico deducir que, un filtro pasa-bajos puede ser muy útil, práctico, rápido, eficiente y estable para un tipo de motor y que no sirva en absoluto para otro tipo de motor brushless a pesar de ser motores idénticos en el aspecto mecánico.
En nuestro caso, decidimos reformar (en función de la práctica y de manera empírica) un circuito utilizado para un sistema de control de frecuencia de un transmisor de FM comercial con su frecuencia de transmisión enganchada en fase por PLL. En forma original, el filtro pasabajos adoptado, no le daba al sistema, el “enclave” justo, sino que la velocidad final del motor quedaba oscilando alrededor del valor correcto, pero nunca se detenía y enganchaba en fase con la referencia. Luego de algunas variaciones leves de los valores de los componentes nos fuimos acercando hacia la situación ideal hasta al fin lograr un sistema de enganche de fase efectivo y confiable, tal como se puede notar en los videos anteriores (muy a pesar del destornillador) (¡que cada vez es más grande!)
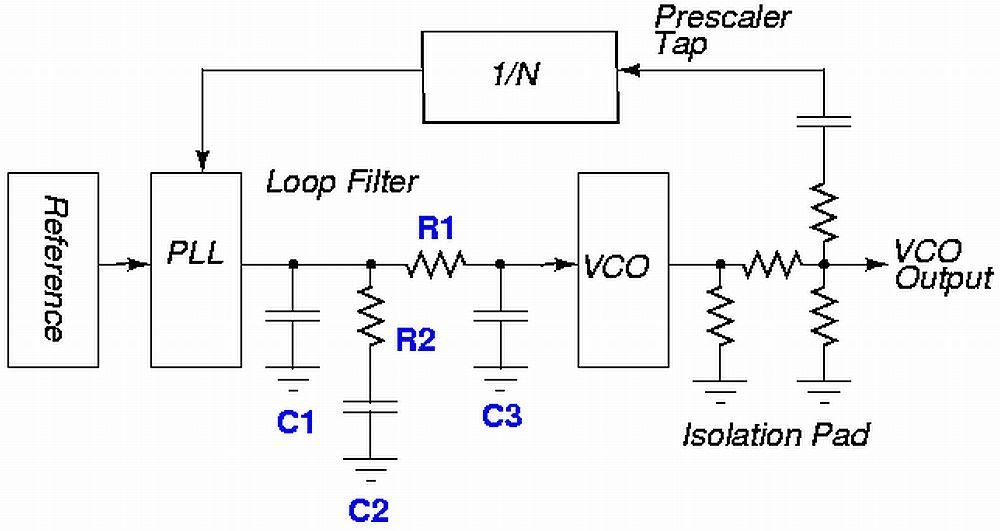
Por lo tanto, queremos dejar bien aclarado entonces que, los valores utilizados en nuestro ejemplo difícilmente coincidan con los que pueda necesitar el motor que tú adoptes, pero al menos tendrás un punto de partida con el esquema dado y con el modelo presentado. Por supuesto que no significa que sea el mejor o el más adecuado, sino que es uno de los tantos posibles diseños existentes y que a nosotros nos ha dado buenos resultado con el motor empleado. De todos modos, la hoja de datos del CD4046 (la encontrarás al final del artículo) te ofrece ejemplos de filtros de segundo orden y nosotros te ofrecimos en el esquema un filtro de tercer orden con una dirección web, además de la imagen superior. Allí encontrarás calculadoras en línea para resolver los valores necesarios y poder construir un filtro acorde a tu necesidad. Aquí es donde cada uno puede dejar su toque especial al sistema, dando rienda suelta al conocimiento y la creatividad. Los medios están ofrecidos, ahora depende de ti.
Cómo identificar las conexiones del motor Brushless DRUM
Lo primero e inmediato que identificaremos serán los bobinados y o transductores encargados de proporcionarnos los pulsos PG y FG. El bobinado impreso en la placa, con formato de espiras “cuadradas”, ubicado del lado del entrehierro del “estator”, rodeando al mismo, será quien nos suministre los impulsos FG fundamentales para el control exacto de la velocidad de giro de nuestro motor a través del sistema de lazo enganchado en fase (PLL) que estamos experimentando. A los impulsos PG por su parte, los obtendremos de distintas formas posibles de acuerdo al diseño del motor. Habrá veces que notaremos un Sensor o Switch Hall en la parte inferior, quién recibirá inducción de parte de un pequeño imán móvil, solidario a la tapa inferior del motor. Otras veces, será una pequeña bobina ubicada del lado interior del entrehierro del estator o también posicionada del lado externo. De todas formas, al igual que a la otra bobina te será muy sencillo identificarla y no confundirlas entre sí.
Otra conexión sencilla de encontrar es la del Control de Velocidad. La misma siempre se encuentra sola, conectada en forma directa a algún pin del IC, que por lo general es el pin 1, sin tener más conexión que un capacitor de desacoplo conectado a GND. Nos resta identificar la alimentación de 12 Volts que encontraremos observando que la misma lleva, a través de resistencias SMD, alimentación a los Sensores Hall correspondientes a los bobinados del estator, los que se ubican de forma física, entre medio de éstos. Naturalmente encontraremos que también conecta al IC por lo general en dos pines por separado (Driver y Potencia), y posee muy cercano a su entrada, un capacitor SMD de .1uF (color marrón). Por último identificaremos GND. Si esta conexión no está involucrada en un generoso plano de tierra sobre la placa es común encontrarla sobre la parte metálica del IC de potencia que activa el motor. Por lo tanto, las conexiones a identificar son tan sólo cinco y serán las siguientes:
- Alimentación – +12 Volts
- GND
- Control de Velocidad
- Pulsos P
- Pulsos FG
¿Y los Pulsos PG?
Hasta aquí hemos hablado solamente de los Pulsos FG y en ningún momento le hemos asignado uso alguno a los Pulsos PG que esta hermosa joya mecánica puede brindarnos. Los Pulsos PG, cómo ya habíamos visto, nos entregarán la información de las RPM que alcance nuestro sistema y además nos brindarán la vital lectura de la Posición Angular del rotor. Una vez identificado el componente Hall o la bobina captora en la placa de control del motor, nos daremos cuenta donde se halla el imán que inducirá en él/ella el Pulso PG y que se encuentra en la tapa inferior del motor, en la parte móvil del mismo. (Lo vimos en el video del desarme)
Luego, también encontraremos que la posición angular de activación puede ser alterada si giramos la pieza de bronce solidaria al eje, donde se atornilla la tapa inferior del motor y que posee el imán inductor. Todo esto lo vimos en los videos. ¿No has visto los videos? ¿Qué esperas? ¿Para qué crees que puede servirnos un pulso PG? ¿Para qué crees que necesitaremos saber donde se encuentra a cada momento el rotor respecto a la base? ¿Te animas a adivinar? ¿O prefieres esperar a la próxima entrega?


Muy bueno, muy bueno, muy detallado y muy bien explicado.
En Colombia tambien conocemos a estos tornillos como prisioneros, o como tornillos tipo bristol.
Ok, adivinemos, haber: si conozco la posicion del rotor, puedo conocer la velocidad de giro, pero ademas si conozco la posicion en cada momento, podria asemejarse a un motor paso a paso (de grandes pasos), pero con una retroalimentacion, es decir es como si tuviera un encoder, que me cuenta las vueltas que da el motor. Creeria que puede ser asi, estoy suponiendo.
Una pregunta Mario, que torque puede llegar a tener este tipo de motores?,
Un saludo, y ya estoy esperando la tercera parte.
Hola Yesbond!
Gracias por us palabras amigo! 🙂
Como los nombres suelen cambiar de una región a otra no estaba muy seguro de cómo mencionarlos en el video, pero sabía que todos me comprenderían. 😉 Aquí les llamamos prisioneros a los que sirven para esa aplicación y al tipo de tornillo (por su hendidura hexagonal para calzar la herramienta de ajuste) lo llamamos "Allen".
Buen análisis, pero a las vueltas que dá el motor ya te las entrega el pulso FG que usamos. El pulso PG nos daría una "posición angular". Dicho de otro modo (más pistas no puedo dar): sabiendo donde está ubicado ese imán podría saber que parte del tambor está al norte, al sur, etc. y si lo coloco en vertical sabría donde es arriba, abajo, a la derecha … jajaja !!! Seguro que con esta pista te confundí más !!! :))
El torque de este motor en particular no es alto. Es bajo. La aplicación original dentro de una VHS no requería un motor de alto torque. Hay otros motores que poseen un torque muy poderoso. El tipo de motor usado en los cuadricópteros o aeromodelismo son muy potentes. La potencia del imán y el tamaño de las bobinas del estator definen ese parámetro.
Saludos!
Mario
Pero por supuesto!!!!!!!!!!!!!, Tienes razon me confundiste mas, pero con esta informacion podria contruir un brazo robotico cuya articulacion sea el motor?, o una brujula?, ya se una paleta que se colocan en los peajes de las vias?, si lo coloco en vertical puedo simular un palo de golf?, me paso lo de kung-fu. Me kunfundi, mejor espero tu proxima entrega.
Un abrazo
Hola Mario,
Si hay algo que me indique el norte o el sur, eso sería un brújula. Y algo que me indique arriba abajo a la derecha, etc. eso sería orientación, un giroscopio?. No puedo adivinar por donde va la cosa pero estaré pendiente de la tercera entrega.
Saludos amigo!
jaja xd..me gusta eso Yesbond
Interesante ya despertó mi curiosidad voy a seguir este articulo hasta el final aunque debo reconocer que es mucha información para mi pequeño cerebro
Gracias por acompañarnos tiobo!
La aplicación final te despertará más curiosidad aún! 🙂
Saludos!
Mario
Prisioneros, Allen o Umbraco son marcas de fabricantes de estos tornillos, buen informe
Buen dato pancho!
Gracias!
Mario
Hola Mario.
Muy buena explicación y bien detallado. Se que me estoy apartando del tema, pero como sería un multiplicador de frecuencia?. El frecuencímetro que has mostrado es un montaje tuyo?.
Saludos amigo!
Hola falke! 🙂
Un multiplicador de frecuencia es un circuito integrado al que le conectas, por ejemplo, ese cristal de 2 Mhz. y obtienes múltiplos de esa frecuencia. 4, 6, 8, 10, 12, 16, 20Mhz, etc. El IC NB3N3020 es un ejemplo de eso. (http://www.icbase.com/pdf/ONS/ONS39050911.pdf)
Sí, el frecuencímetro es un montaje mío. No es una idea mía, pero lo construí adaptándolo a mis necesidades con medidor de cristales incluído. Este año (si me alcanza el año para todo lo que quiero hacer) quizás lo hagamos aquí en NeoTeo. :))
Saludos amigo!
Mario
No te queria preguntar por esto porque pedir mas es casi un abuso, pero si este frecuencimetro lo hacemos este 2011, estaria mas que de lujo Mario. Se ve genial.
Gracias, por brindarnos tus conocimientos. Que pasaria si al motor Brushless le agrego un pequeño peso digamos de 100 a 200 gramos, el mismo se estabilizaria en la velocidad prefijada. Respondeme dentro de tus posibilidades. Gracias nuevamente.
Hola cireman!
Cuéntame con más detalles dónde le agregarías el peso que expresas.
Al centro del rotor? Balanceado sobre el rotor? Desbalanceado y cercano al perímetro del rotor? Le atornillarías / sujetarías una rueda con ese peso al centro del rotor?
Cuántame un poco más hacia dónde apunta la pregunta para saber como organizar la respuesta 😉
Saludos!
Mario
Muchisimas gracias por responder, es verdad que di pocos detalles pero mi pregunta apunta a realizar un display giratorio con led. que muestre mensajes de textos y dibujos simples. Digamos con un radio de 16 led de 5mm. Me podes decir si esto es factible y que cosas debo tener encuenta para que no sea todo un fracaso. Ya lei lo de propoller clock. Te sigo muy de cerca. Grande Mario Sacco.
Hola Mario: Bárbaro el desarrollo. Simple, eficaz como el destornillador. ¿Para qué queremos saber dónde se encuentra el rotor? Sencillo . . para prender un LED. Me entusiasma saber que tu idea de desarrollos se orienta a la construcción de instrumental, porque fuera de las adaptaciones que uno pueda hacer (según las necesidades) de los prototipos aquí presentados, el instrumental concretamente es la diferencia entre hacer ó no cualquier proyecto. Es dificil cortar una madera cuando primero uno debe fabricarse el serrucho. Me sumo a tus ideas. Un Saludo a todos.
Exelente los videos, y es para felicitarte lo temerario de ese cocodrilo pasando por las conexiones de los IC para mostrarnos las distintas frecuencias.
Saludos.
Hola señor Mario, de nuevo ,mil gracias por compartir con nosotros todos esos conocimientos que nos enriquecen en grande. Casualmente , estoy trabajando en un automodelo el cual quiero diseñar o hacer yo mismo todas las etapas electronicas , desde transmisión hastacontrol y quiero utilizar motores brushless para mayor velocidad y menor consumo de baterias, con lo cual , estos artículos me caen de prelas. También estoy de acuerdo con "yesbond" con lo del frecuencímetro; hace algún tiempo hice uno pero solo me funcionó para medir RPM ,por lo de la cantidad de muestras por segundo que puede tomar el 16f628 por el pin B0 ,pero 2 Mhz sería una locura para mi diseño. En cuanto a la "adivinanza" , me viene dando vueltas en la cabeza el diseño de una centrífuga (de las que se usan para separar compuestos de una solución determinada como por ejemplo separar los glóbulos rojos y el plasma ,de la sangre )programable a cierto número de
vueltas . Yo le daría este uso a toda esta información. De nuevo , Mil Gracias desde Colombia.
Hola , muy buen articulo…
que curioso una vez tuve en mente un proyecto similar aun que no lo pude hacer, consistia en hacer lo mismo con el motor brushless del vhs pero montado un espejo para hacer un spirografo laser …. bueno esa era la idea talvez este proyecto sea algo similar…
Excelente mario…oye una pregunta donde conseguiste el frecuenciometro, es muy portatil????
Hola el voltaje del control de velocidad es a 12v?
hola, estuve desarmando uno, y me encontre con uno que tiene un integrado de montaje superficial de marca sony, un par de resistencias y capacitores smd. Pero no hay un integrado que maneje potencia, al menos no el encapsulado caracteristicos asi que ni siquiera la masa pude encontrar jeje.
Buen día Mario, te quería preguntar, en tu opinión, suponiendo que se hace un proyecto para hacer autitos para niños una onda Perego o Power Wheels, pero se quiere hacer un producto durable (raro hoy día) y evitar las cajas reductoras de engranajes de plástico, que sería más conveniente, un motor CC de escobillas o un motor brushless? y en dichos casos que sistema de control requieren para que funcionen a bajas vueltas sin arruinar el rendimiento (que obviamente arruinaría la durabilidad de las baterías por uso). Soy estudiante de ingeniería industrial y bastantes cosas las entiendo pero hay cosas que por no ser electrónico se me escapan jaaa… Un saludo y hasta pronto. Muy buenas tus publicaciones
Buen día Mario, te quería preguntar, en tu opinión, suponiendo que se hace un proyecto para hacer autitos para niños una onda Perego o Power Wheels, pero se quiere hacer un producto durable (raro hoy día) y evitar las cajas reductoras de engranajes de plástico, que sería más conveniente, un motor CC de escobillas o un motor brushless? y en dichos casos que sistema de control requieren para que funcionen a bajas vueltas sin arruinar el rendimiento (que obviamente arruinaría la durabilidad de las baterías por uso). Soy estudiante de ingeniería industrial y bastantes cosas las entiendo pero hay cosas que por no ser electrónico se me escapan jaaa… Un saludo y hasta pronto. Muy buenas tus publicaciones
Buen día Mario, te quería preguntar, en tu opinión, suponiendo que se hace un proyecto para hacer autitos para niños una onda Perego o Power Wheels, pero se quiere hacer un producto durable (raro hoy día) y evitar las cajas reductoras de engranajes de plástico, que sería más conveniente, un motor CC de escobillas o un motor brushless? y en dichos casos que sistema de control requieren para que funcionen a bajas vueltas sin arruinar el rendimiento (que obviamente arruinaría la durabilidad de las baterías por uso). Soy estudiante de ingeniería industrial y bastantes cosas las entiendo pero hay cosas que por no ser electrónico se me escapan jaaa… Un saludo y hasta pronto. Muy buenas tus publicaciones
Hola estos motores son como los de los discos duros no? como aria un circuito para hacer andar un motor de disco duro??
hola que tal mario.
te comento mi problema:
Estoy queriendo usar un motor de estos para un proyecto de la escuela (un propeler clock), pero necesito ayuda para identificar los pines para ver si lo puedo arrancar.
hola amigo, mi nombre es Diego y soy de Brasil, me pregunto lo que significa que el MP del terminal en dos de los diagramas de arriba, uno justo encima del condensador C3 y C6 de 15 nano. Estoy armando un propeller sin embargo tengo que construir este circuito se han mostrado PPL para alimentar el motor. ¡Gracias!
hola Mario mi nombre es Omar soy de Venezuela, hace unos dias estoy realizando el montaje de control de velocidad para este tipo de motor, pero he tenido muchos problemas con el enganche tanto que luego de muchos cambios en los valores no he logrado el enganche de fase, he logrado que los pulso FG ronden el la frecuencia de 1kHz pero la señal FG se nota defasada en relación a la referencia, te escribo por que de verdad necesito tu ayuda. a una pregunta para así ahorrar tiempo.con cuanto volt alimentas el 4046? mi CI es hef4046bp no se si hay alguna diferencia. mi generador y amplificador para los FG funcionan muy bien lo único es eso que no logro el enganche de fase…. muchas gracias de ante mano y espero su pronta ayuda.
#29
Hola Omar!
Todo ese circuito de control se alimenta con 12Volts.
Si logras recuperar los pulsos FG y alcanzas a ingresar al comparador de fase (el 4046)(sí, el que mencionas te sirve) con los pulsos bien definidos, ya tienes 1/3 del problema resuelto.
El otro 1/3 es que el oscilador de referencia te entregue la frecuencia de 1Khz y el último 1/3 lo pone el motor.
Si el motor no alcanza a llegar a esa velocidad (cosa que no creo) nunca lograrás el enganche, pero debieras poder hacerlo sin problemas.
Intenta lubricar bien el motor y que no esté pesado. Tal vez a simple tacto no se nota, pero en marcha sí. Y de última, trabaja sobre el filtro pasa-bajos, perfeccionándolo a la medida de tu motor. Esos son todos los secretos resumidos para que el montaje funcione.
Saludos!
Mario
amigo no soy el moderador pero los MP son los pines donde se colocan las puntas de osciloscopio para así observar las señales tanto la de referencia con respecto a la de los pulsos fG. espero haber ayudado..
Gracias Mario seguiré trabajando, como dices el motor si se siente como pesado, estoy revisando en la pagina como diseñar el filtro.cuando tenga la respuesta deseada comentaré todos los inconvenientes y soluciones en mi caso. gracias
Hello !
I have seen your PLL-Motor driver in internet. Excuse my bad english, but i am from austria! Can i have an e-mail contact with you?
best regards
hpt
el integrado es mitsubishi? acaso no es el m51721sl?
Buenisimo el trabajo y la explicacion, me gustaria saber, cual es el motivo por el cual, no se utiliza el oscilador controlado por voltaje VCO interno del CD4046? Muchas gracias.
hola buenisimo el trabajo y la explicacion, me gustaria saber por que no se utiliza el oscilador controlado por voltaje VCO, interno del CD4046. Muchas Gracias.
A ver si entendi bien, ¿puedo variar la frecuecia de entrada, digamos con un 555 y asi tener un motor de velocidad variable? respetando sus limites claro, tengo algunos drum y sus hermanitos capstan que no me gustaria tirar a la basura…
gracias
Hola. Mario.
Estoy realizando mi propeller clock y e seguido tus post paso a paso sin perder nada aunque solo llevo unas pocas semanas en el blog. Bueno el punto es el siguiente: el prototipo esta muy adelante ya esta trabajando y estoy realizando el programa para el micro en lenguaje c, el sistema que utilice para la alimentacion de cto es el metodo de las ecobillas y a funcionado con gran eficiencia, el unico inconveniente es el acople que diseñe para acondicionarle el motor ya que tiene que ser con una precision milimetrica y no poseo las herramientas. La cuestion es que quiero acondicionarle el motor brushless. Por fin concegui uno tras mucho buscar estoy en el proceso de verificar los pines. Al desarmar del motor me encuentro que tiene mas de dos bobinas mal contadas le veo 6 o 7 entonces no sabria cual usar lo otro seria una asesoria en el diseño del pll para su funcionamiento. Espero que me puedas ayudar muchas gracias de antemano.
gracia por explicacion. me sirvio un monton. en la brevedad estoy con ese proyecto. espero no molestar si hago algun tipo de consulta. un abrazo y gracias.
buenisim tu informe me haserido enormemente. espero no molestar si tengo alguna cosulta en su aplicacion. felicitaciones muchas gracias
Oye el filtro pasabajas pasivo, lo puedo hacer activo?
Estoy pensando en un filtro pasabajas de orden tres con la frecuencia de corte a 1khz. Como ves crees que funcione.